

| หากต้องการใบเสนอราคา / ใบแจ้งหนี้ ติดต่อได้ทาง LINE Official: @mikroelec |
 |
โมดูลวัดระยะทางด้วยเรเซอร์ TOF200F 2M(max) Modbus I2C Serial Output Multi-Mode High Precision Distance Sensor Module


| รหัสสินค้า | SKU-02406 |
| หมวดหมู่ | เซนเซอร์วัดระยะทาง |
| ราคา | 260.00 บาท |
| ลงสินค้า | 14 ส.ค. 2566 |
| อัพเดทล่าสุด | 2 ม.ค. 2568 |

รายละเอียดสินค้า
| Documentation |
| Datasheet | TOF200F.pdf |
| Application Note | - |
Ranging chip: VL53L0X;
Measuring distance: 2M (MAX);
Measurement blind area: 0-3cm;
Measurement mode (range): 0.default 1.2M,
1. High precision 1.2M,
2. Long distance 2M,
3. high speed 1.2M;
Infrared emission mechanism: 940nm;
FOV angle of view: 25 degrees;
Communication mode: serial port mode/modbus mode/IIC mode;
Working voltage: 3-5V (DC);
Working current: 40MA (MAX);
Working temperature: -20℃-70℃;
Storage temperature: -20℃-80℃.
Host computer debugging
การดีบั๊กด้วยคอมพิวเตอร์ หลังจากเชื่อมต่อกับโมดูล USB to TTL แล้ว ให้เสียบโมดูลพอร์ตอนุกรมเข้ากับพอร์ต USB ของคอมพิวเตอร์ ตรวจสอบให้แน่ใจว่าได้ติดตั้งไดรเวอร์ของโมดูลพอร์ตอนุกรมและพบพอร์ต COM ที่เกี่ยวข้อง เปิดซอฟต์แวร์คอมพิวเตอร์ของเซ็นเซอร์วัดระยะ TOF เมื่อเชื่อมต่อครั้งแรก ให้ตั้งค่าความเร็วบอดเป็นค่าเริ่มต้น 115200 เลือกระบบรุ่นที่เกี่ยวข้องใน "การกำหนดค่าระบบ" และคลิก "เริ่ม" คุณจะเห็นการแสดงผลแบบเรียลไทม์ของคอลัมน์ระยะทางที่วัดได้ใน "การแสดงสถานะ" และค่าที่วัดได้จะรีเฟรชอย่างต่อเนื่องตามระยะทางจริงที่เปลี่ยนแปลง
เลือกคอลัมน์การกำหนดค่าพารามิเตอร์ คุณจะเห็นพารามิเตอร์ 4 กลุ่มสำหรับผู้ใช้ในการตั้งค่าหรือสังเกต ซึ่งสะดวกสำหรับการดีบั๊ก พารามิเตอร์การจัดเก็บ 1 เป็นฟังก์ชันการตั้งค่าที่ใช้บ่อย ผู้ใช้สามารถตั้งค่าที่อยู่อุปกรณ์ ความเร็วบอด โหมดระยะทาง รอบการส่งออก ฯลฯ และพารามิเตอร์จะถูกบันทึกทันทีหลังจากตั้งค่าและมีผลแม้เมื่อปิดเครื่อง วิธีการตั้งค่า: ป้อนค่าของตัวเลือกที่ต้องการโดยตรงในค่าของบรรทัดฟังก์ชันที่เกี่ยวข้อง และกด Enter
ที่อยู่อุปกรณ์เขียนโดยตรง; โปรดดูชุดคำสั่งสำหรับพารามิเตอร์ที่แสดงถึงตัวเลือกเฉพาะของความเร็วบอด/รอบการส่งออก ตัวอย่างเช่น ความเร็วบอด 0 แทนค่าเริ่มต้น 115200; รอบการส่งออกเขียนโดยตรงในหน่วยมิลลิวินาที (โปรดทราบว่าเป็นรอบเวลาของการส่งออกอัตโนมัติของพอร์ตอนุกรม และรอบเวลาการอ่านข้อมูลของคอมพิวเตอร์จะคงที่) การแก้ไข K สามารถระบุตัวคูณของระยะทางที่ส่งออกและระยะทางจริง ซึ่งเหมาะสำหรับวัตถุประสงค์พิเศษ ในบรรทัดฟังก์ชัน "Load Calibration" และ "Disable iic" ค่า 1 หมายถึงเปิดใช้งาน และ 0 หมายถึงปิดใช้งาน
พารามิเตอร์การจัดเก็บ 2 โดยทั่วไปใช้สำหรับการสังเกต สำหรับค่าเฉพาะ โปรดดูข้อกำหนดของชิป
การตั้งค่าพารามิเตอร์การปรับเทียบสองรายการสุดท้ายใช้กับฟังก์ชันการปรับเทียบ สำหรับการปรับเทียบออฟเซ็ต แนะนำให้ใช้วัตถุเป้าหมายสีขาวที่มีการสะท้อนแสง 88% ในสภาพมืดและปรับเทียบที่ระยะทางจริง 10 ซม. นั่นคือ วางวัตถุที่ระยะทางจริง 10 ซม. ป้อน 10 ซม. ในบรรทัดฟังก์ชันการปรับเทียบออฟเซ็ต กด Enter เพื่อเริ่มการปรับเทียบ และรอให้การแสดงพารามิเตอร์กลับสู่ภาวะปกติเพื่อเสร็จสิ้นการปรับเทียบ การปรับเทียบออฟเซ็ต 10 ซม. ได้ดำเนินการแล้วหนึ่งครั้งในโรงงานผลิตจริง และสามารถใช้งานได้โดยตรง การปรับเทียบ xtalk มีวัตถุประสงค์หลักเพื่อปรับเทียบปัจจัยการรบกวนข้ามที่เกิดจากหน้าต่างครอบด้านหน้าของหัวตรวจ โมดูลนี้ได้ติดตั้งแผ่นกระจกครอบพิเศษและได้รับการปรับเทียบจากโรงงานแล้ว เมื่อผู้ใช้ต้องการใช้งานโดยไม่มีแผ่นครอบหรือใช้หน้าต่างครอบอื่น สามารถใช้ฟังก์ชันนี้สำหรับการปรับเทียบการรบกวนข้ามได้ วิธีการเฉพาะคือแนะนำให้ใช้เป้าหมายสีเทาที่มีการสะท้อนแสง 17% ค่าระยะทางการรบกวนข้ามจำเป็นต้องอ้างอิงข้อกำหนดของชิปและสภาพแวดล้อมการใช้งานจริง หลังจากเลือกแล้ว ให้อ้างอิงขั้นตอนการทำงานของคอมพิวเตอร์สำหรับการปรับเทียบออฟเซ็ต
การใช้งาน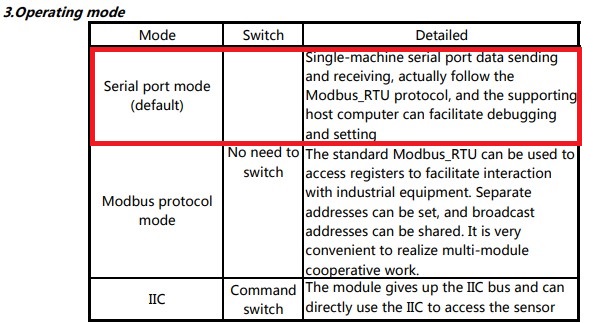
ค่าเริ่มต้นของโมดูลคือ โมดูลจะส่งค่าระยะที่ตรวจจับได้ออกมาอย่างต่อเนื่อง ในรูปแบบ Modbus RTU protocal
เช่น อ่านค่าได้เช่น วัตถุมีระยะห่างจากเซนเซอร์ 90 mm.
จะอ่านค่าได้ 0x01 0x03 0x02 0x00 0x5D 0x79 0xBD เป็นต้น
โดยรูปแบบของข้อมูลจะเป็นไปตามตาราง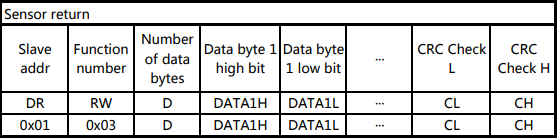
ผู้ใช้งานสามารถเชื่อมต่อด้วยไมโครคอนโทรเลอร์หรือคอมพิวเตอร์ได้โดยใช้โมดูล USB to TTL
วิธีการเชื่อมต่อสายสัญญาณ TOF050 (โหมด default) กับ Arduino NANO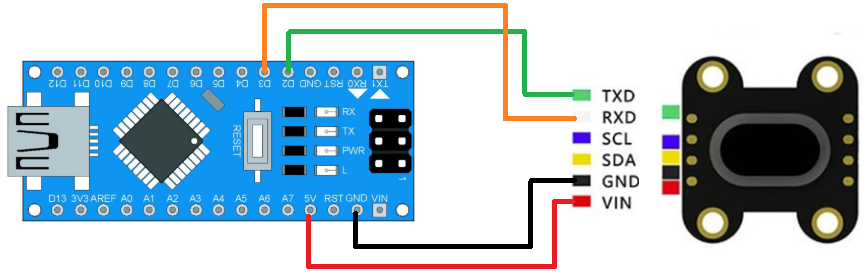
ตัวอย่างโคด
ผลการทดสอบ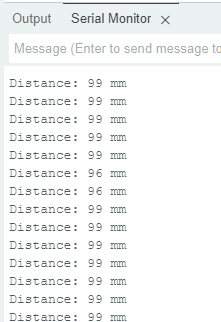
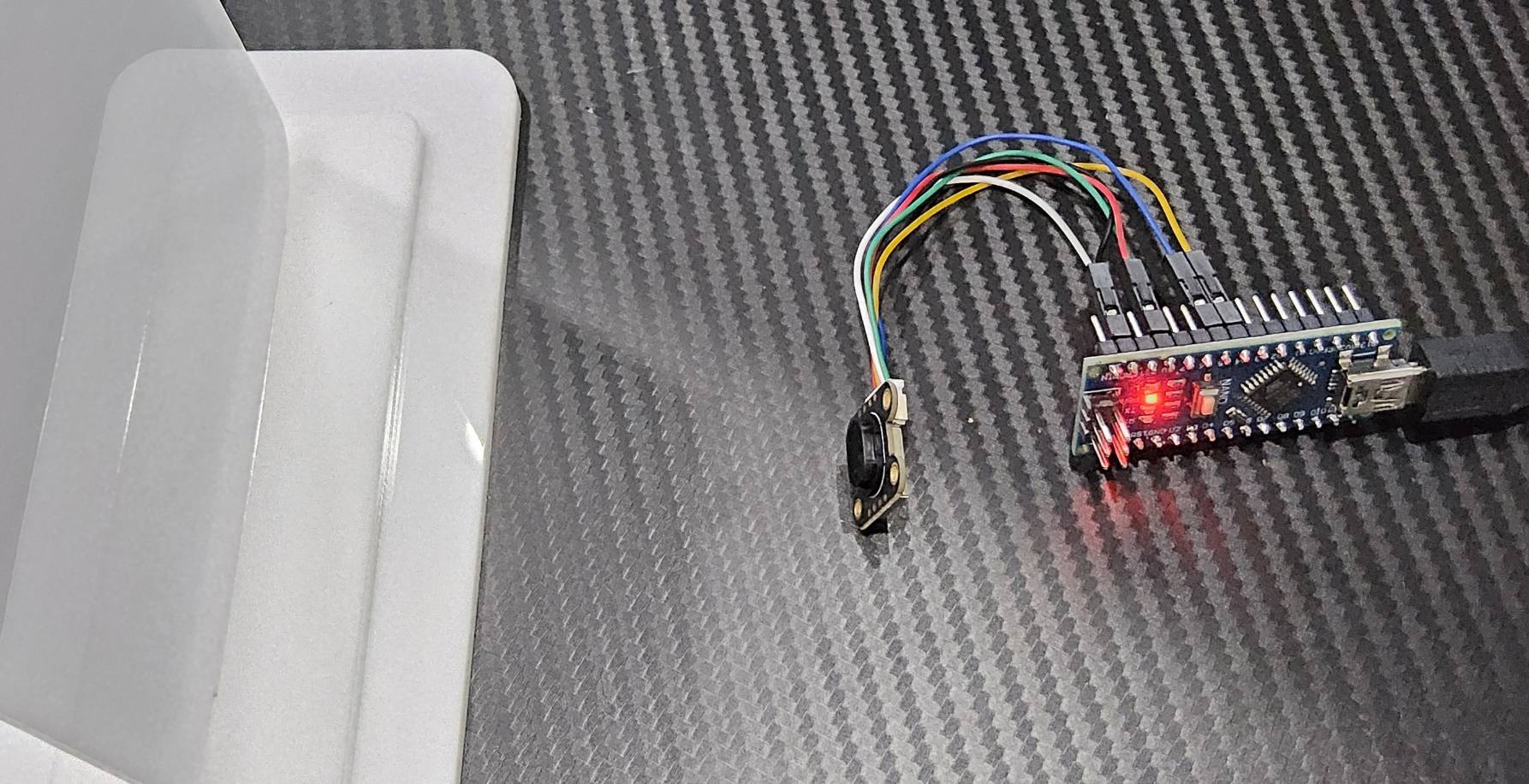
ภาพการทดสอบ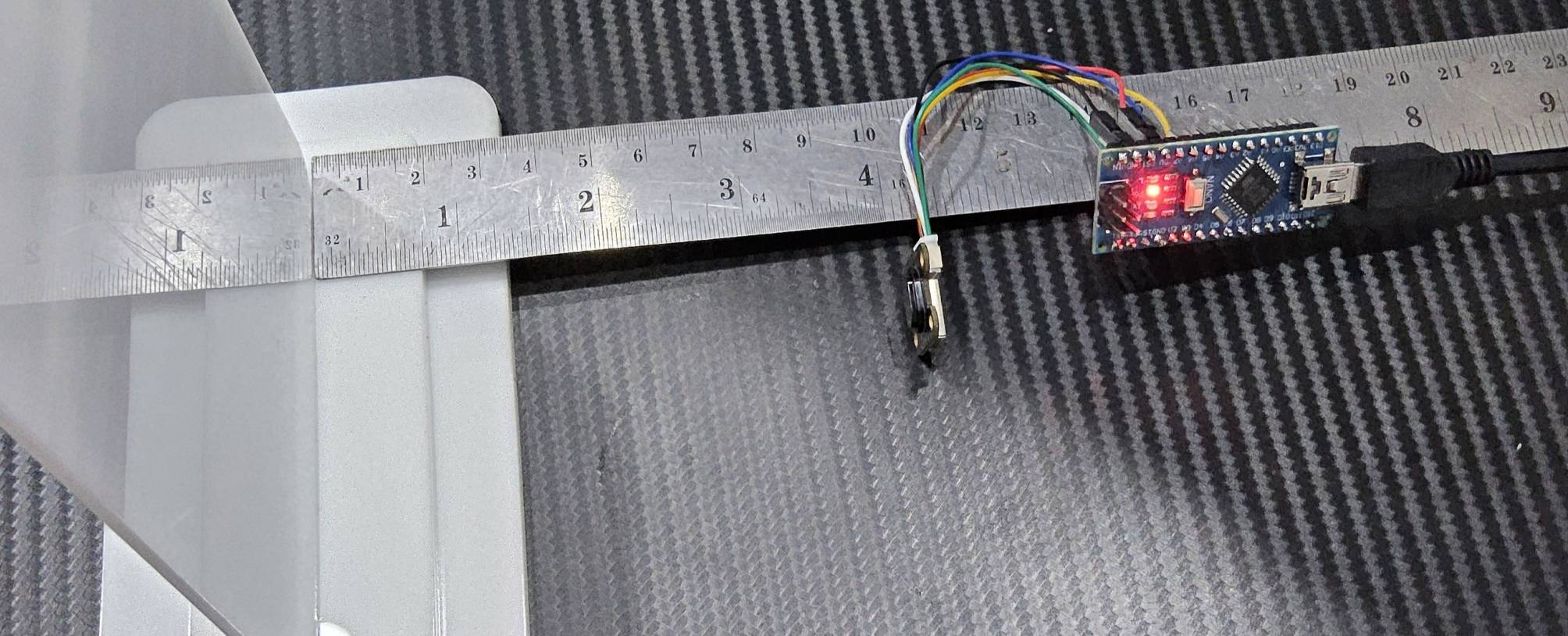
วิธีการเปลี่ยนการตั้งค่าโมดูลวัดระยะทางเป็นโหมด I2C
อุปกรณ์ที่เกี่ยวข้อง
วิธีการเชื่อมต่อสายสัญญาณเพื่อใช้กับ PC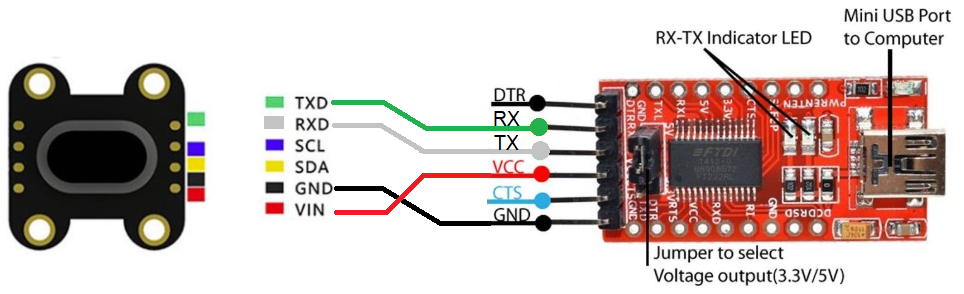
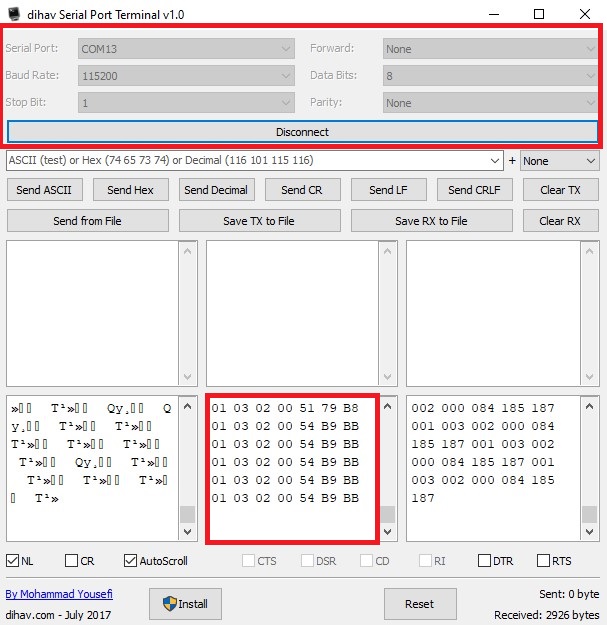
ดาวน์โหลดโปรแกรม Serial Port Terminal เพื่อใช้รับค่าและส่งคำสั่งต่างๆกับโมดูล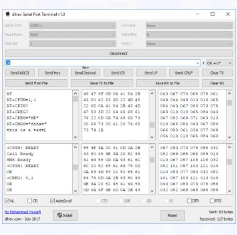
เมื่อลงโปรแกรมแล้วเปิดโปรแกรมแล้วตั้งค่าตามรูปเมื่อกดปุ่ม connect จะอ่านค่าข้อมูลที่เซนเซอร์ส่งมาได้ต่อเนื่อง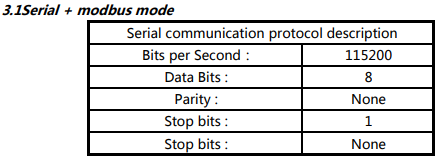
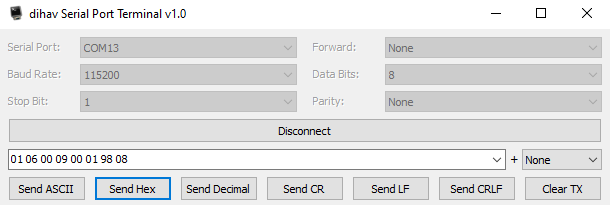
หากต้องการเปลี่ยนโหมดให้สื่อสารเป็นแบบ I2C 
ให้ส่งคำสั่ง 01 06 00 09 00 01 98 08 โดยใช้โปรแกรม Serial Port Terminal แล้วกดปุ่ม Send Hex
จะเห็นได้ว่าข้อมูลที่ส่งมาต่อเนื่องจะหยุดลงทันทีเนื่องจากเปลี่ยนเป็นโหมด I2C แล้ว
โดยจะมี Address เริ่มต้นที่ 0x29
หากต้องการตั้งค่าอื่นๆก็สามารถทำได้โดยวิธีเดียวกันนี้แต่ต้องเอาคำสั่งมาคำนวน CRC ก่อนใช้งานด้วย
เนื่องจากเป็นมาตรฐานของ Modbus สามารถใช้เว็บคำนวนที่มีทั่วไปได้เพื่อความสะดวกเช่น
เว็บ On-line CRC calculation and free library
ตัวอย่างเช่น คำสั่งที่เคยใช้เปลี่ยนโหมดเป็น I2C คือ 01 06 00 09 00 01 + CRC 2 byte
เราจะหาค่านี้ได้โดยเข้าไปที่เว็บแล้วใส่คำสั่งลงไป เลือกประเภทเป็น Hex เมื่อกดคำนวนจะได้ค่า CRC ออกมา
ให้เราเลือกเป็น CRC-16 (Modbus) 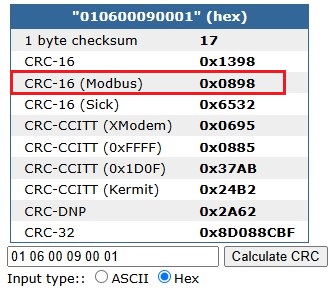
แต่เนื่องจากการส่งข้อมูล Modbus จะเป็นแบบ Little-endian: ไบต์ที่มีค่าสำคัญที่สุด (MSB) จึงต้องสลับตำแหน่ง CRC ด้วย
จาก 0898 จะต้องสลับเป็น 9808 จึงได้คำสั่งรวมทั้งหมดคือ 01 06 00 09 00 01 98 08 เพื่อนำไปใช้จริง
หลังจากนั้นให้ต่อสายสัญญาณต่างๆตามรูป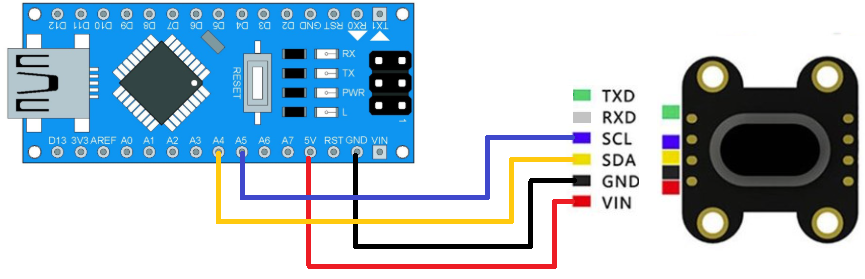
จากนั้นให้ download Library VL53L0X library for Arduino หลังจากแตกไฟล์แล้วนำไปไส่ไว้ที่ Arduino\libraries
ตัวอย่างโคดในโหมด I2C
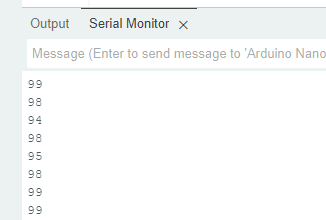
ภาพการทดสอบ






วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



นโยบายการเปลี่ยนหรือคืนสินค้า
หมายเหตุ
ต้องไม่เสียหายอันเกิดจากใช้งานผิดพลาด ใช้ผิดวิธี ต่อไฟผิดขั้ว จ่ายไฟเกินกำหนด หรืออื่นๆที่ตรวจสอบแล้วไม่ได้เกิดจากความผิดพลาดจากการผลิตสินค้า

Member

อีเมล : mikroelec@gmail.com
TOP เลื่อนขึ้นบนสุด
