

| หากต้องการใบเสนอราคา / ใบแจ้งหนี้ ติดต่อได้ทาง LINE Official: @mikroelec |
 |
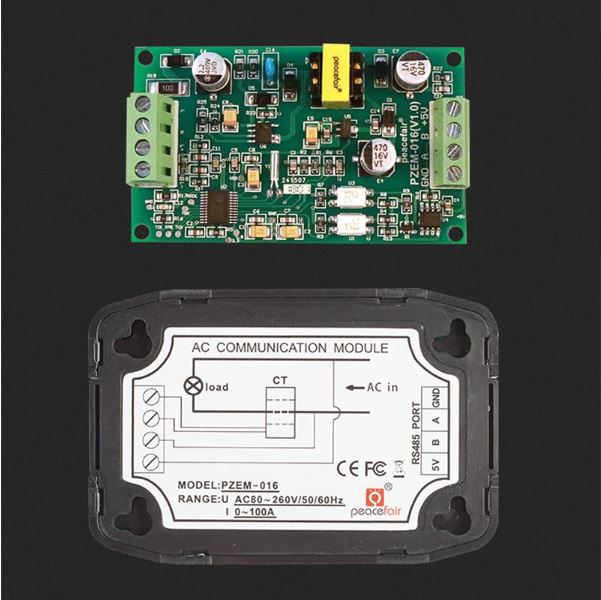
PZEM-016 Energy Meter AC 100A Voltage Current Energy Hz Power factor RS485 Modbus Module with CT







| รหัสสินค้า | SKU-01668 |
| หมวดหมู่ | โมดูลวัดแรงดันและกระแสไฟฟ้า |
| ราคา | 450.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| ลงสินค้า | 4 ส.ค. 2564 |
| อัพเดทล่าสุด | 17 พ.ย. 2567 |
| จำนวน | ชิ้น |

รายละเอียดสินค้า
| Documentation |
| Data sheet | PZEM-016.pdf |
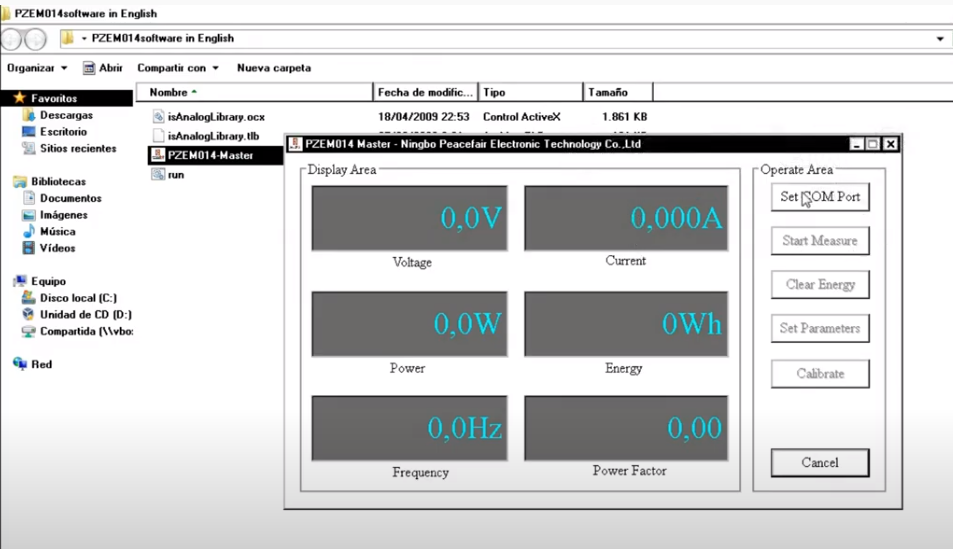
Program for windows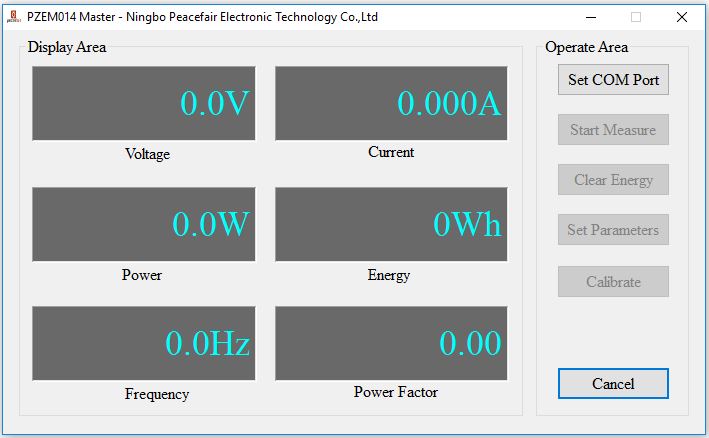 |
PZEM014,016-Master-English.zip |
| 1. Example&Libraries GitHub | Blynk with 3 phase 3 PZEM-016 and NodeMCU |
| 2. Example&Libraries GitHub | Blynk with 1 phase PZEM-016 and NodeMCU(Single Device) |
| 3. Library | ModbusMaster |
https://www.youtube.cm/watch?v=74gKMTsHmYY
PEACEFAIR PZEM-016 80~260V 100A Multi-function Meter Voltage Current Power Factor Frequency Energy Tester Tools
Features:
- The physical layer adopts UART to RS485 communication interface, with baud rate of 9,600, 8-bit data bits, 1-bit stop bits and no verification
- This Multi-function Meter can measure voltage, current, power, power, frequency, power factor
- Over power alarm: ctive power threshold can be set, when the measured active power exceeds the threshold, it can alarm
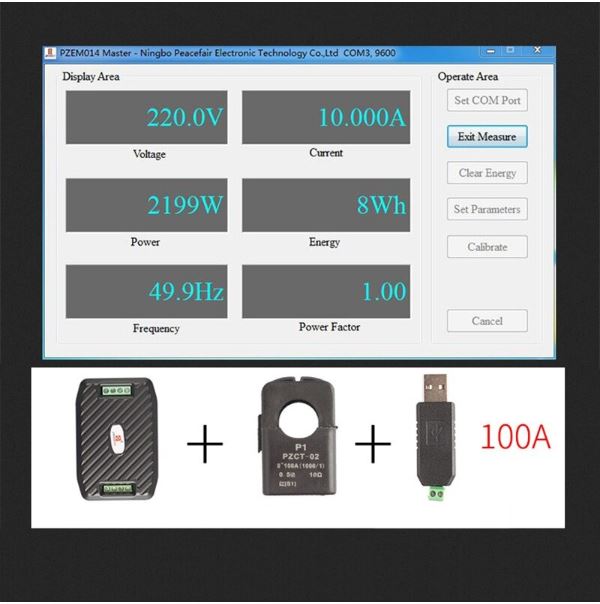
- It can display six measurement parameters on the computer when communicate through the software
- The high test accuracy, better compatibility will make it use widely.
Specifications:
Brand: PEACEFAIR
Model: PZEM-016
Voltage
Measuring range:80~260V
Resolution: 0.1V
Measurement accuracy: 0.5%
Current
Measuring range: 0~100A
Starting measure current: 0.02A
Resolution: 0.001A
Measurement accuracy: 0.5%
ctive power
Measuring range: 0~23kW
Starting measure power: 0.4W
Resolution: 0.1W
Display format:
When the data is <1000W, it display one decimal, such as: 999.9W
When the data is ≥1000W, it display only integer, such as: 1000W
Measurement accuracy: 0.5%
Power factor
Measuring range: 0.00~1.00
Resolution: 0.01
Measurement accuracy: 1%
Frequency
Measuring range: 45Hz~65Hz
Resolution: 0.1Hz
Measurement accuracy: 0.5%
ctive energy
Measuring range: 0~9999.99kWh
Resolution: 1Wh
Measurement accuracy: 0.5%
Display format:
When the data is <10kWh, the display unit is Wh(1kWh=1000Wh), such as: 9999Wh
When the data is ≥10kWh, the display unit is kWh, such as: 9999.99kWh
Reset energy: use software to reset.
Communication interface: RS485 interface
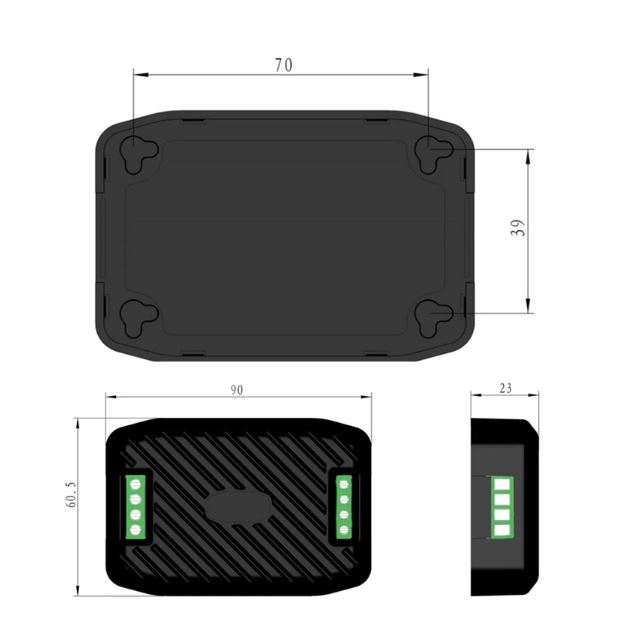
Size:90 x 60.5mm / 3.54 x 2.38in
Weight: pprox.118~154g
Package includes:
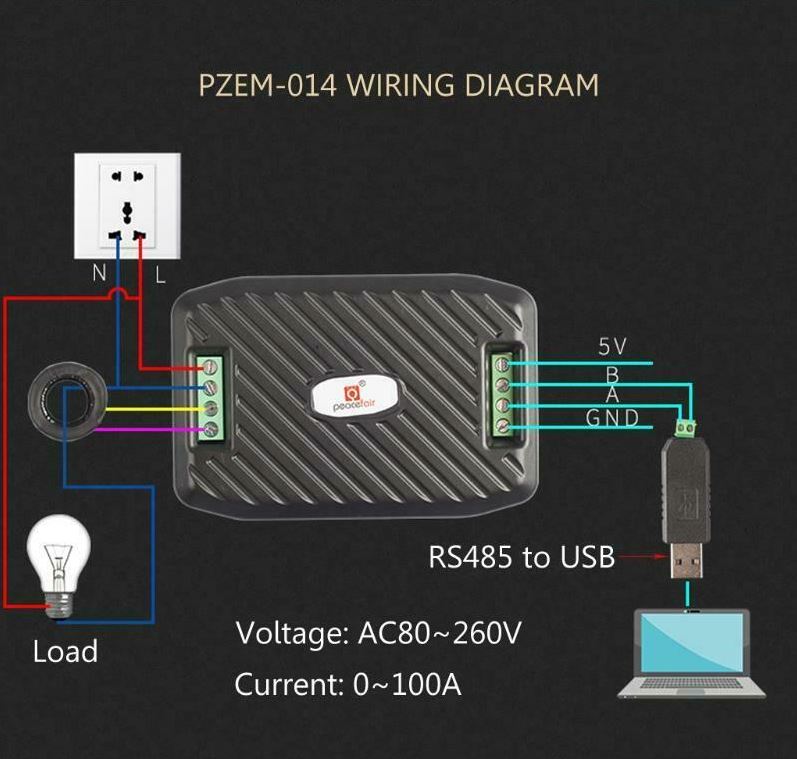
1*Meter + 1*open type CT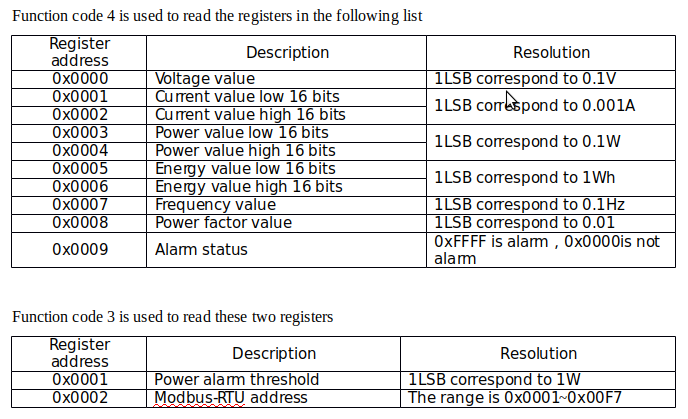
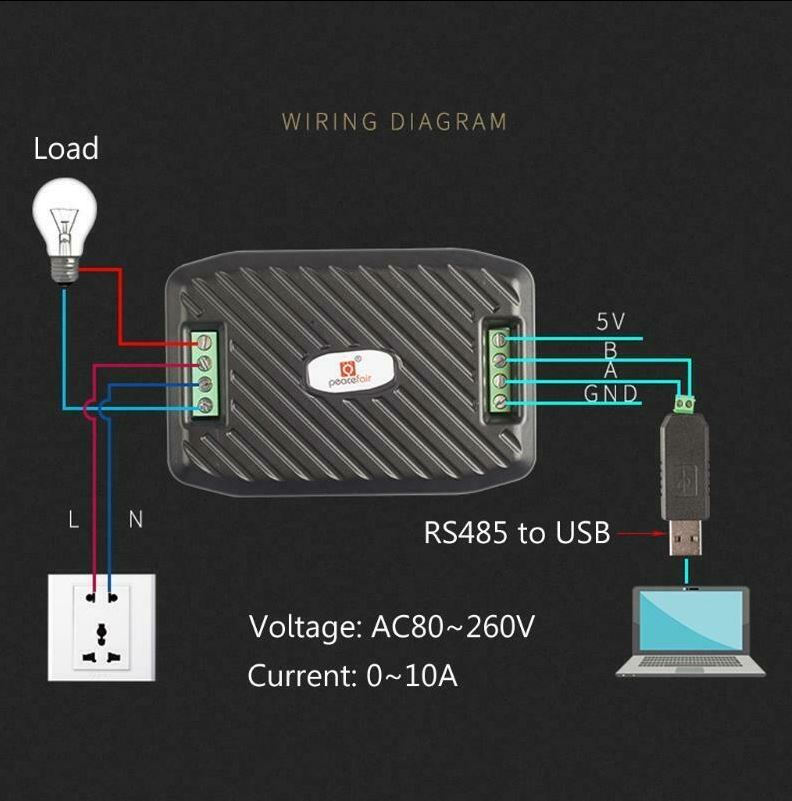
Connection Diagram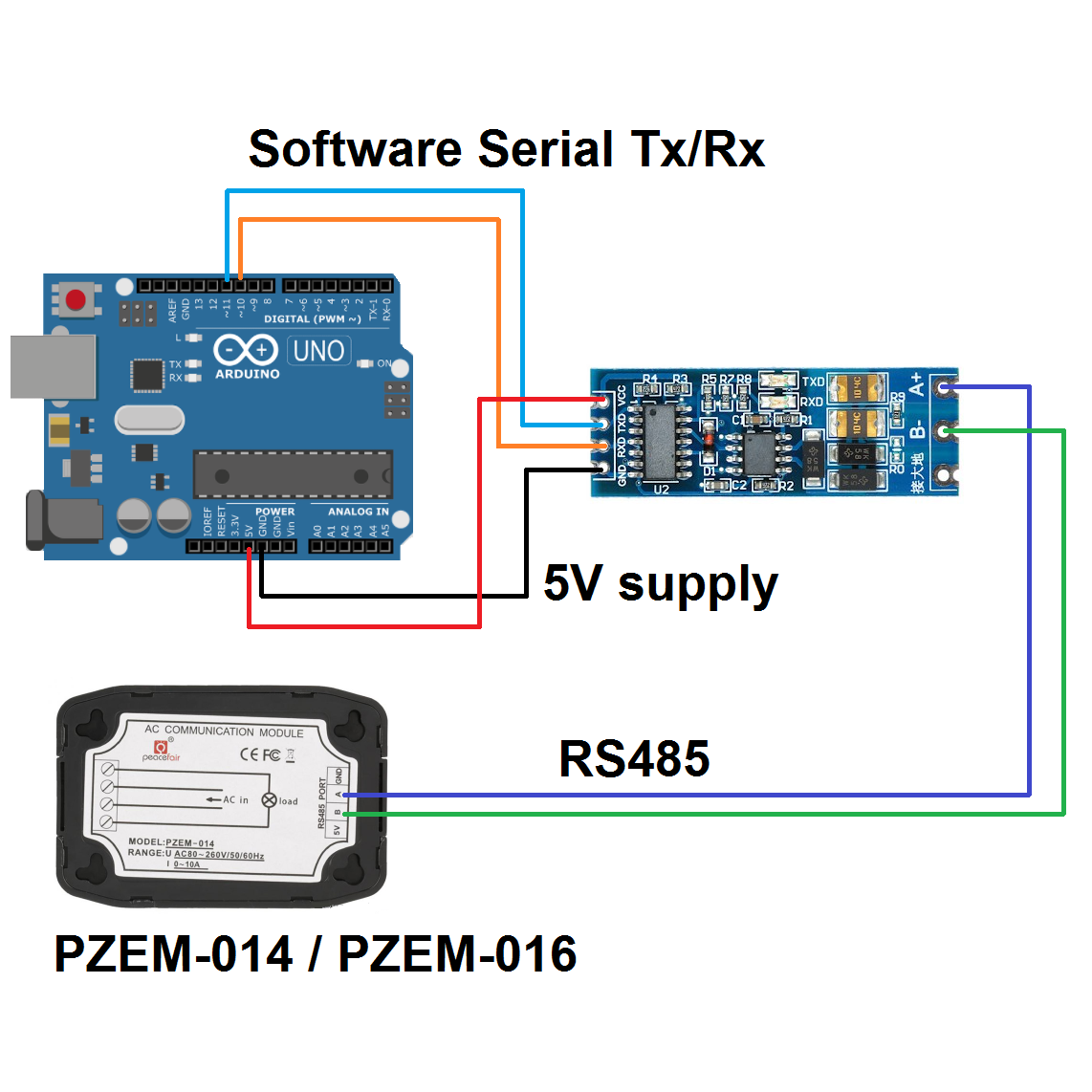
Arduino Sketch
// An Arduino Sketch for reading data from a PZEM-014 or PZEM-016
// Arduino library for communicating with ModbusMaster
#include <ModbusMaster.h> #include <SoftwareSerial.h> SoftwareSerial pzemSerial(10,11); //rx, tx ModbusMaster node; static uint8_t pzemSlaveAddr = 0x01; #define LEDPIN 13 void setup() { pzemSerial.begin(9600); Serial.begin(9600); //resetEnergy(pzemSlaveAddr); node.begin(pzemSlaveAddr, pzemSerial); pinMode(13, OUTPUT); digitalWrite(LEDPIN,0); } /* RegAddr Description Resolution 0x0000 Voltage value 1LSB correspond to 0.1V 0x0001 Current value low 16 bits 1LSB correspond to 0.001A 0x0002 Current value high 16 bits 0x0003 Power value low 16 bits 1LSB correspond to 0.1W 0x0004 Power value high 16 bits 0x0005 Energy value low 16 bits 1LSB correspond to 1Wh 0x0006 Energy value high 16 bits 0x0007 Frequency value 1LSB correspond to 0.1Hz 0x0008 Power factor value 1LSB correspond to 0.01 0x0009 Alarm status 0xFFFF is alarm,0x0000is not alarm */ void loop() { uint8_t result; digitalWrite(LEDPIN,1); result = node.readInputRegisters(0x0000, 9); //read the 9 registers of the PZEM-014 / 016 digitalWrite(LEDPIN,0); if (result == node.ku8MBSuccess) { float voltage = node.getResponseBuffer(0x0000) / 10.0; uint32_t tempdouble = 0x00000000; float power; tempdouble |= node.getResponseBuffer(0x0003); //LowByte tempdouble |= node.getResponseBuffer(0x0004) << 8; //highByte power = tempdouble / 10.0; float current; tempdouble = node.getResponseBuffer(0x0001); //LowByte tempdouble |= node.getResponseBuffer(0x0002) << 8; //highByte current = tempdouble / 1000.0; uint16_t energy; tempdouble = node.getResponseBuffer(0x0005); //LowByte tempdouble |= node.getResponseBuffer(0x0006) << 8; //highByte energy = tempdouble; Serial.print(voltage); Serial.print("V "); Serial.print(current); Serial.print("A "); Serial.print(power); Serial.print("W "); Serial.print(node.getResponseBuffer(0x0008)); Serial.print("pf "); Serial.print(energy); Serial.print("Wh "); Serial.println(); } else { Serial.println("Failed to read modbus"); } delay(2000); } void resetEnergy(uint8_t slaveAddr){ //The command to reset the slave's energy is (total 4 bytes): //Slave address + 0x42 + CRC check high byte + CRC check low byte. uint16_t u16CRC = 0xFFFF; static uint8_t resetCommand = 0x42; u16CRC = crc16_update(u16CRC, slaveAddr); u16CRC = crc16_update(u16CRC, resetCommand); Serial.println("Resetting Energy"); pzemSerial.write(slaveAddr); pzemSerial.write(resetCommand); pzemSerial.write(lowByte(u16CRC)); pzemSerial.write(highByte(u16CRC)); delay(1000); } void changeAddress(uint8_t OldslaveAddr, uint8_t NewslaveAddr) { static uint8_t SlaveParameter = 0x06; static uint16_t registerAddress = 0x0002; // Register address to be changed uint16_t u16CRC = 0xFFFF; u16CRC = crc16_update(u16CRC, OldslaveAddr); u16CRC = crc16_update(u16CRC, SlaveParameter); u16CRC = crc16_update(u16CRC, highByte(registerAddress)); u16CRC = crc16_update(u16CRC, lowByte(registerAddress)); u16CRC = crc16_update(u16CRC, highByte(NewslaveAddr)); u16CRC = crc16_update(u16CRC, lowByte(NewslaveAddr)); Serial.println("Changing Slave Address"); pzemSerial.write(OldslaveAddr); pzemSerial.write(SlaveParameter); pzemSerial.write(highByte(registerAddress)); pzemSerial.write(lowByte(registerAddress)); pzemSerial.write(highByte(NewslaveAddr)); pzemSerial.write(lowByte(NewslaveAddr)); pzemSerial.write(lowByte(u16CRC)); pzemSerial.write(highByte(u16CRC)); delay(1000); }
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



นโยบายการเปลี่ยนหรือคืนสินค้า
หมายเหตุ
ต้องไม่เสียหายอันเกิดจากใช้งานผิดพลาด ใช้ผิดวิธี ต่อไฟผิดขั้ว จ่ายไฟเกินกำหนด หรืออื่นๆที่ตรวจสอบแล้วไม่ได้เกิดจากความผิดพลาดจากการผลิตสินค้า

Member

อีเมล : mikroelec@gmail.com
TOP เลื่อนขึ้นบนสุด
