
| หากต้องการใบเสนอราคา / ใบแจ้งหนี้ ติดต่อได้ทาง LINE Official: @mikroelec |
 |
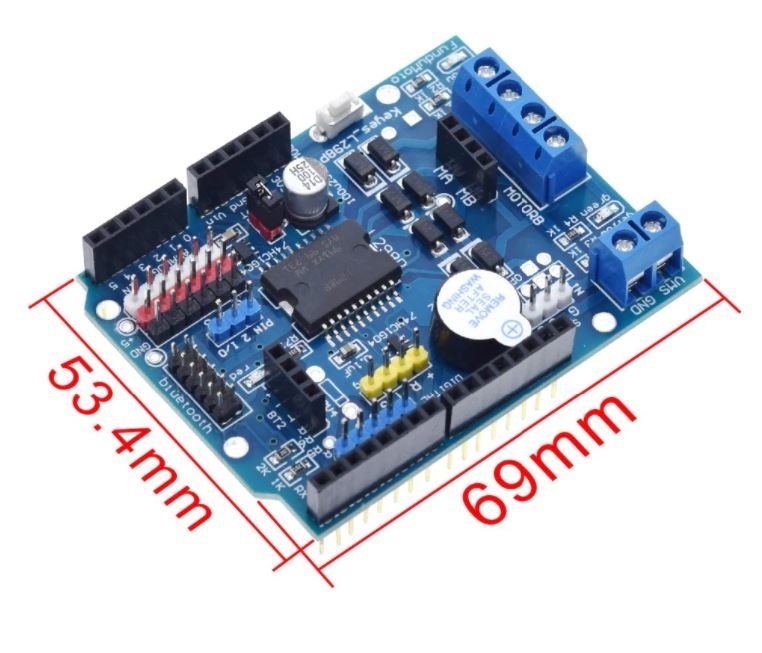
L298P PWM Speed Controller Dual High-Power H-bridge Driver Bluetooth Interface L298P Motor Shield Board for Arduino UNO R3

| รหัสสินค้า | SKU-01053 |
| หมวดหมู่ | Arduino shield & Accessories |
| ราคา | 220.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| ลงสินค้า | 25 พ.ย. 2563 |
| อัพเดทล่าสุด | 25 พ.ค. 2568 |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
Item Description:
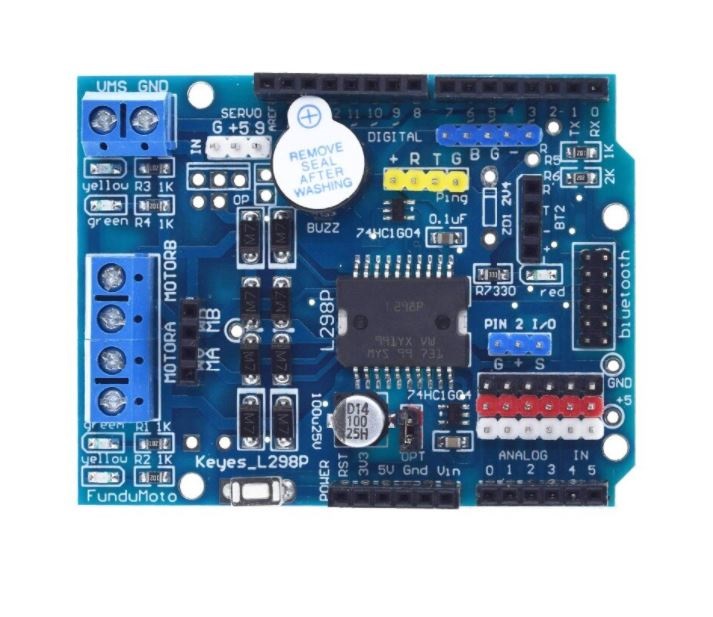
L298P motor driver shield adopts L298P driver chip made by LGS, such chip is exclusively made for high-quality large power motor. It can directly drive two DC motors with driving current reaching 2A. The output port of the motor carries eight high speed Schottky diodes as its protection. The stackable design makes it possible to be directly connected to FOR Arduino, making it more convenient to use!
Technical Specifications:
1.Logical part ofthe input voltageVD: 5V
2.Drivenpart of the inputvoltageVS: VINInput6.5 ~ 12V, PWRIN4.8 ~ 35Vinput
3.Logicalpart of the workcurrentIss: <36mA
4.Drivenpart of theoperating currentIo: <2A
5.Maximum power dissipation: 25W (T = 75Celsius)
6.Controlsignalinput level:High2.3Vlow-0.3V
7.Working temperature: -25 + 130Celsius
8.Hardware interface: 5.0mmpitchterminal
9.beltclipandcan be controlledviafront rowaccesssignal
10.Drive Type:DualpowerH-bridge driver
11.Pinoccupancy: D4 ~ D7directdrive motor
12.supportsPWM / PLLmodemotor speedcontrol
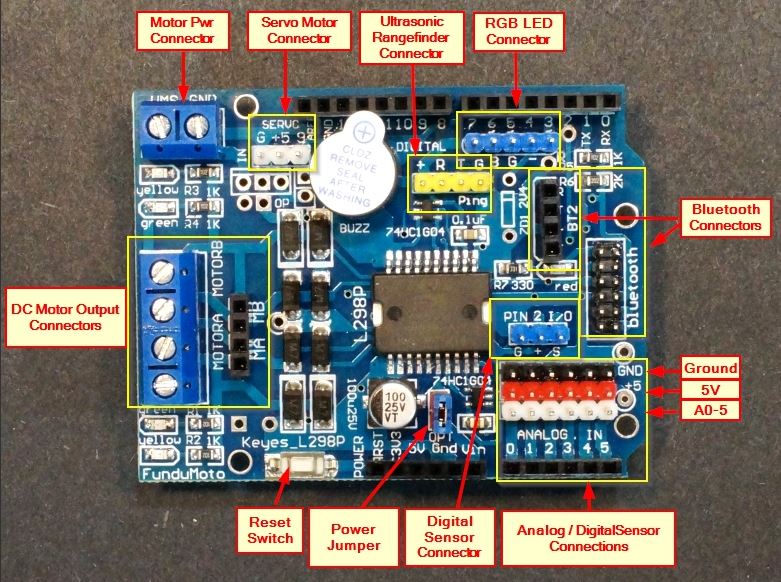
Features:
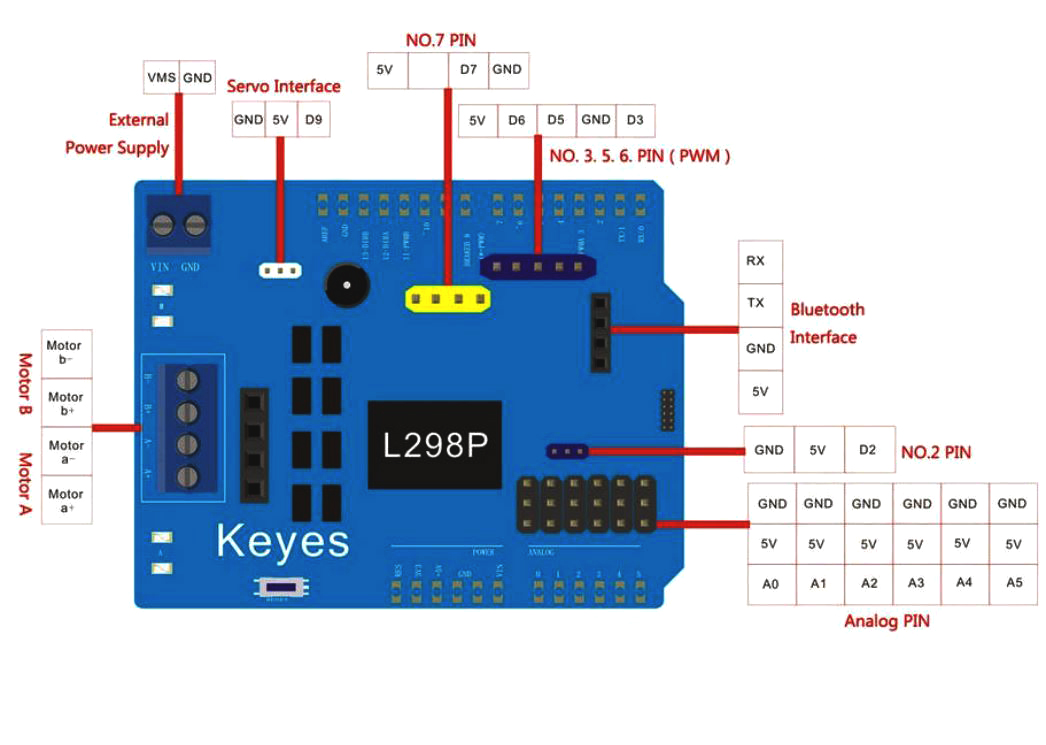
1. There is L298P motor driver chip on the board so that you can use digit IO
interface(D .D10. D11. D12) without cumbersome wiring connection.
2. Onboard buzzer (D4), you can set the astern alarm ringtone.
3. Convenient motor interface can be two routes motor output.
4. Two-way bluetooth interface requires no wiring and you can plug directly.
5. It has seven digital interface that are not occupied(including D 2 , D 3 , D 5 , D 6 ,
D 7 , D 9 , D).
6. It has six analog interfaces(A0, A1, A2, A3, A4, A5).
7. It has indicator for forward and backward changing direction .
Testing:

Testing:
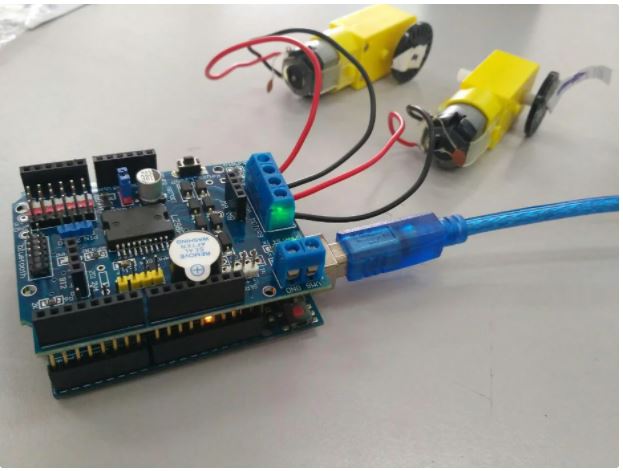
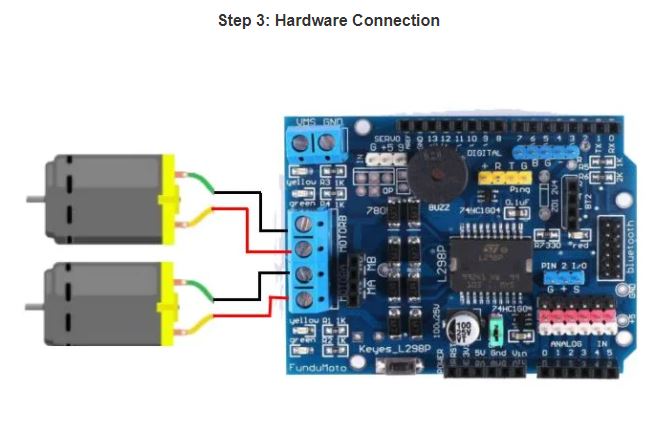
With wiring as the image shows, we can control forward rotation, reverse rotation,
stop and the PWM speed of the two DC motors.
The E1, E2 pins on the 2 motors's control chip with speed control function are
connected with the 10,11 interfaces, And M1, M2 pins with direction control function
are connected with the 12,13 interfaces
Code:
int E1 = 10;int M1 = 12;int E2 =11;int M2 = 13;void setup(){pinMode(M1, OUTPUT);pinMode(M2, OUTPUT);}void loop(){{int value;for(value = 0 ; value <= 255; value+=5){digitalWrite(M1,HIGH);digitalWrite(M2, HIGH);analogWrite(E1, value);analogWrite(E2, value);delay(30);}delay(1000);}{int value;for(value = 0 ; value <= 255; value+=5){digitalWrite(M1,LOW);digitalWrite(M2, LOW);analogWrite(E1, value);analogWrite(E2, value);delay(30);}delay(1000);}}
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



ไมโครอิเล็กทรอนิกส์
098-xxxxxx-9
Accept All Banks | รับเงินได้จากทุกธนาคาร
นโยบายการเปลี่ยนหรือคืนสินค้า
หากสินค้าชำรุดหรือใช้งานไม่ได้ สามารถขอเปลี่ยนสินค้าได้ภายใน 7 วัน
หมายเหตุ
ต้องไม่เสียหายอันเกิดจากใช้งานผิดพลาด ใช้ผิดวิธี ต่อไฟผิดขั้ว จ่ายไฟเกินกำหนด หรืออื่นๆที่ตรวจสอบแล้วไม่ได้เกิดจากความผิดพลาดจากการผลิตสินค้า
หมายเหตุ
ต้องไม่เสียหายอันเกิดจากใช้งานผิดพลาด ใช้ผิดวิธี ต่อไฟผิดขั้ว จ่ายไฟเกินกำหนด หรืออื่นๆที่ตรวจสอบแล้วไม่ได้เกิดจากความผิดพลาดจากการผลิตสินค้า

Member
▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

MikroElectronic
จำหน่ายอุปกรณ์อิเล็กทรอนิกส์ โมดูล เครื่องมือ และอุปกรณ์ต่างๆ arduino อาดูโน อะไหล่เครื่องใช้ไฟฟ้า อะไหล่อิเล็กทรอนิกส์ รับออกแบบวงจร เขียนโปรแกรมด้วยอาดูโน รับทำโครงงาน นักเรียนนักศึกษา ให้คำปรึกษาแก้ปัญหาโครงงาน ออกแบบและสร้างงานต้นแบบ ร้านตั้งอยู่ ซอยร่วมสุข ปทุมธานี สถานที่ใกล้เคียง ดอนเมือง สรงประภา ศรีสมาน นนทบุรี แจ้งวัฒนะ
เบอร์โทร : 0984829329
อีเมล : mikroelec@gmail.com
อีเมล : mikroelec@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม