

| หากต้องการใบเสนอราคา / ใบแจ้งหนี้ ติดต่อได้ทาง LINE Official: @mikroelec |
 |
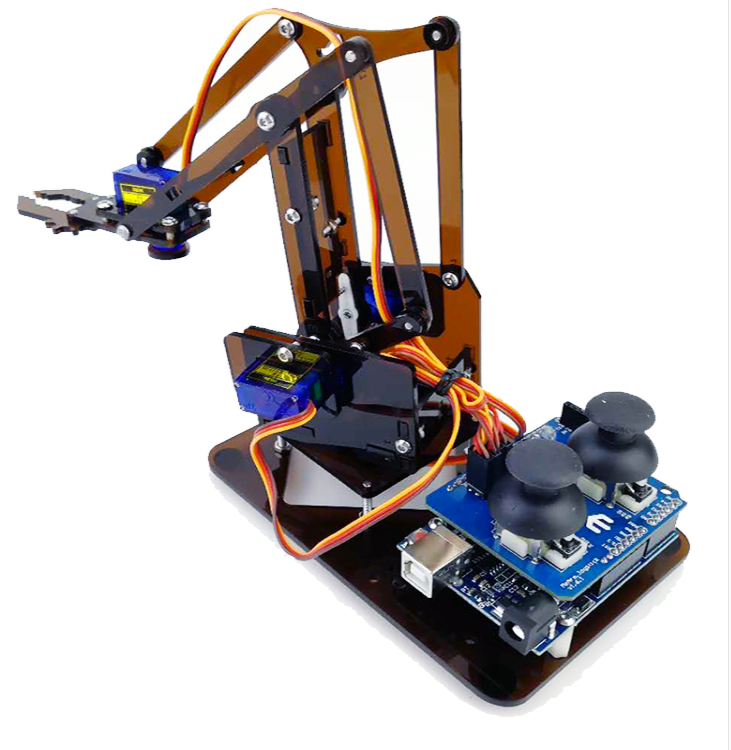
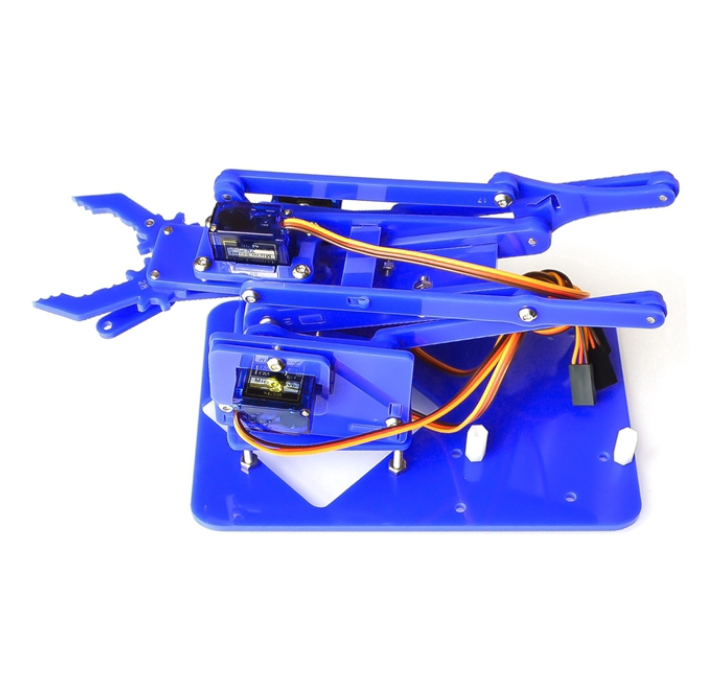
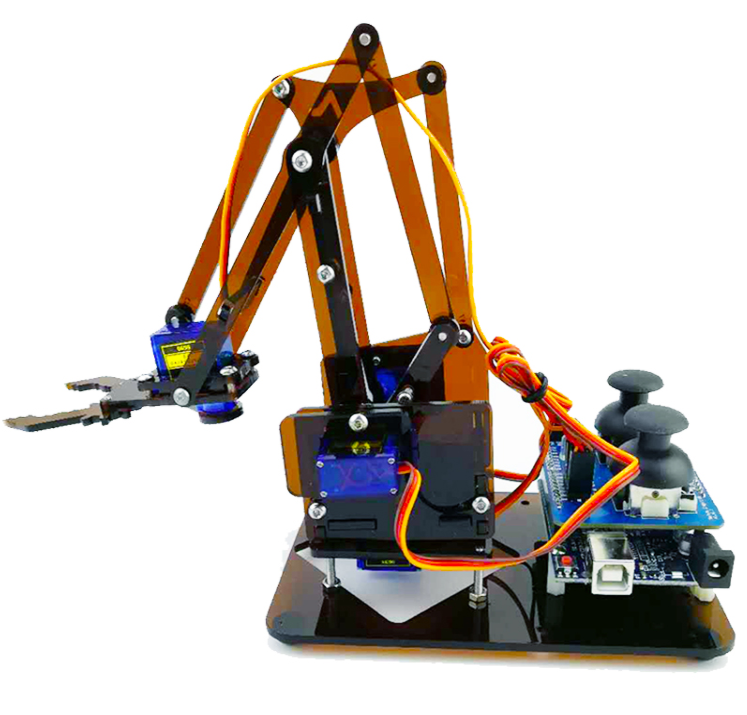
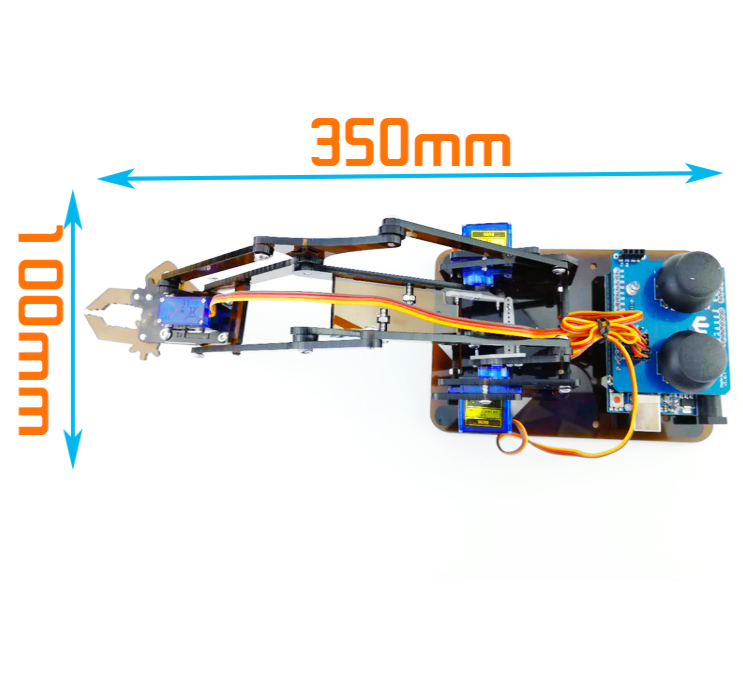
แขนกลหุ่นยนต์ อะคริลิคสีน้ำเงิน (ไม่รวมเซอร์โวและแผงวงจร) UNO R3 servo SG90 Acrylic Blue color Robot Arm DIY Maker Learning เพื่อการเรียนรู้

| รหัสสินค้า | SKU-01051 |
| หมวดหมู่ | แขนกล หุ่นยนต์ |
| ราคา | 250.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| ลงสินค้า | 22 พ.ย. 2563 |
| อัพเดทล่าสุด | 17 ก.ค. 2568 |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
สินค้าที่เกี่ยวข้อง
 |
 |
 |
อุปกรณ์ที่ต้องใช้ (equipment):
Servo SG90 x 4 ชิ้น Robot arm x 1 ชิ้น
Arduino Uno 1 ชิ้น
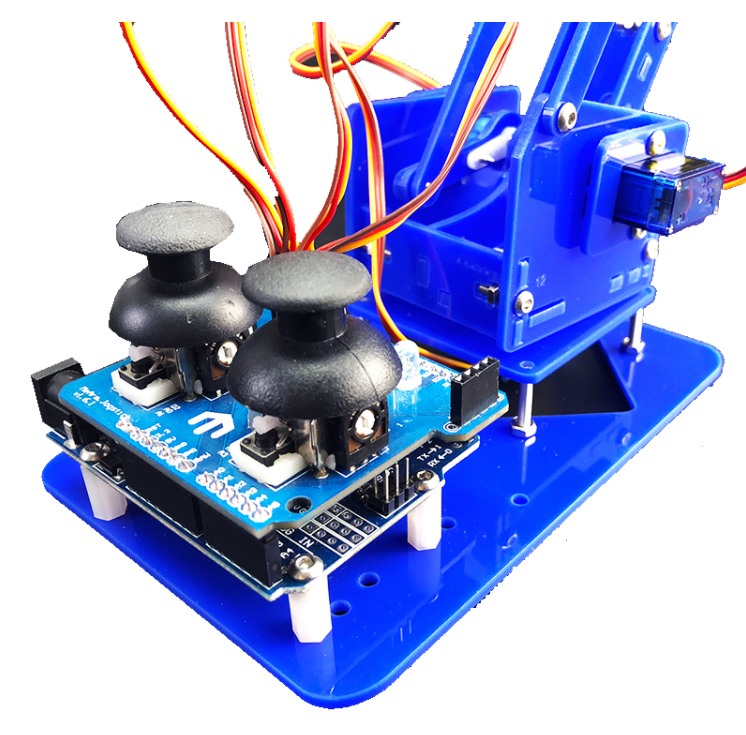
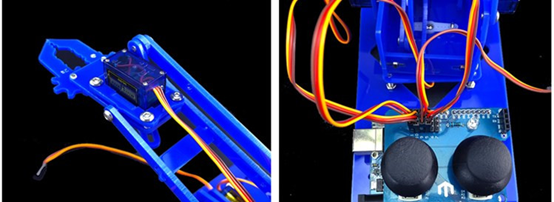
JoyStick Shield expansion board arduino UNO R3 x 1 ชิ้น
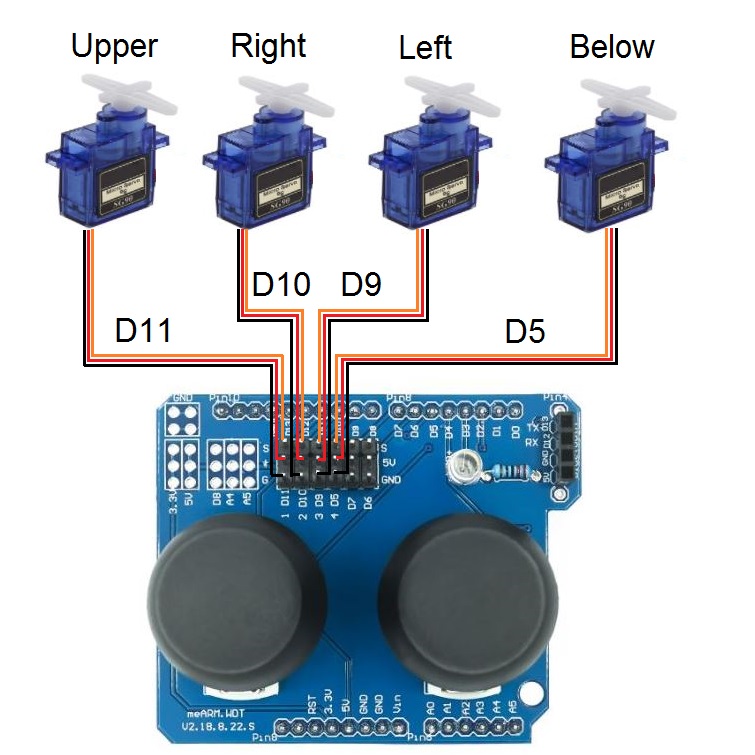
VCC/GND: ต่อเข้ากับโมดูลให้ครบ
I/O ที่เชื่อมต่อกับสัญญาณต่างๆมีดังนี้ Left stick: Y axis: A3 X axis: A2 Z axis: 7 Right joystick: Y axis: A1 X axis: A0 Z axis: 8 Steering steering gear: 3 Left servo: 5 Right steering gear: 9 Mechanical claw steering gear: 11
Use the joystick module connection diagram and code reference:
โคดตัวอย่าง
#include<Servo.h> Servo myservoB; Servo myservoL; Servo myservoR; Servo myservoU; #define Lk 2 #define Rk 4 #define ADLy A1 #define ADLx A0 #define ADRy A2 #define ADRx A3 int Ly,Lx,Ry,Rx; int Bdir = 90,Ldir= 90,Rdir = 90,Udir = 20; void setup(){ Serial.begin(19200); pinMode(Lk,INPUT_PULLUP); pinMode(Rk,INPUT_PULLUP); myservoB.attach(5); myservoL.attach(9); myservoR.attach(10); myservoU.attach(11); myservoB.write(Bdir); myservoR.write(Rdir); myservoL.write(Ldir); myservoU.write(Udir); } int limit = 30,flag = 0; void loop(){ Ly = map(analogRead(ADLy),0,1023,0,179); Lx = map(analogRead(ADLx),0,1023,0,179); Ry = map(analogRead(ADRy),0,1023,0,179); Rx = map(analogRead(ADRx),0,1023,0,179); if(Lx >90+limit && Bdir < 180)Bdir++; else if(Lx < 90-limit && Bdir>0)Bdir--; if(Ly >90+limit && Ldir < 180)Ldir++; else if(Ly < 90-limit && Ldir>0 )Ldir--; if(Rx >90+limit && Bdir < 180)Bdir++; else if(Rx < 90-limit && Bdir>0)Bdir--; if(Ry >90+limit && Rdir < 180)Rdir++; else if(Ry < 90-limit && Rdir>0)Rdir--; myservoB.write(Bdir); myservoL.write(Ldir); myservoR.write(Rdir); if(digitalRead(Rk) == LOW){ delay(20); if(digitalRead(Rk) == LOW){ while(digitalRead(Rk) == LOW); flag = 1-flag; } }else if(digitalRead(Lk) == LOW){ delay(20); if(digitalRead(Lk) == LOW){ while(digitalRead(Lk) == LOW); flag = 1-flag; } } myservoU.write(flag*20); Serial.print("Ly"); Serial.print(Ly); Serial.print("\tLx"); Serial.print(Lx); Serial.print("\tRy"); Serial.print(Ry); Serial.print("\tRx"); Serial.println(Rx); delay(15); }
Installation instructions link:
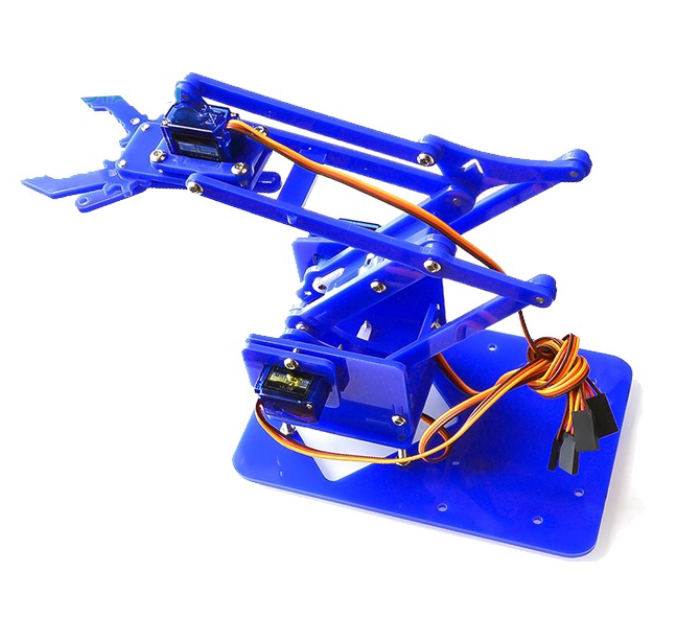
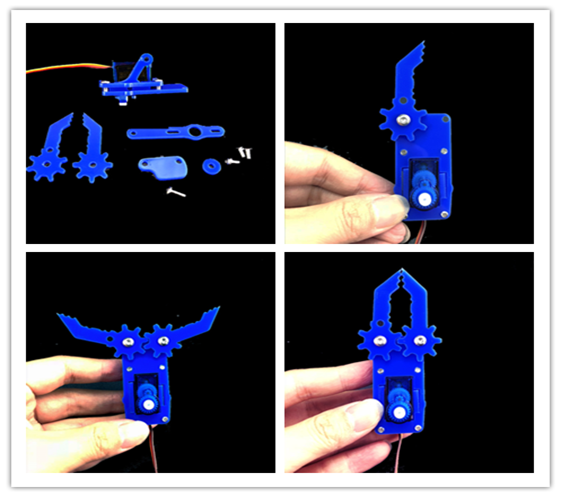
ตัวอย่างการประกอบชิ้นงาน
วิธีการประกอบอีกเว็บนึงเป็นทางเลือกเพิ่มเติม LINK
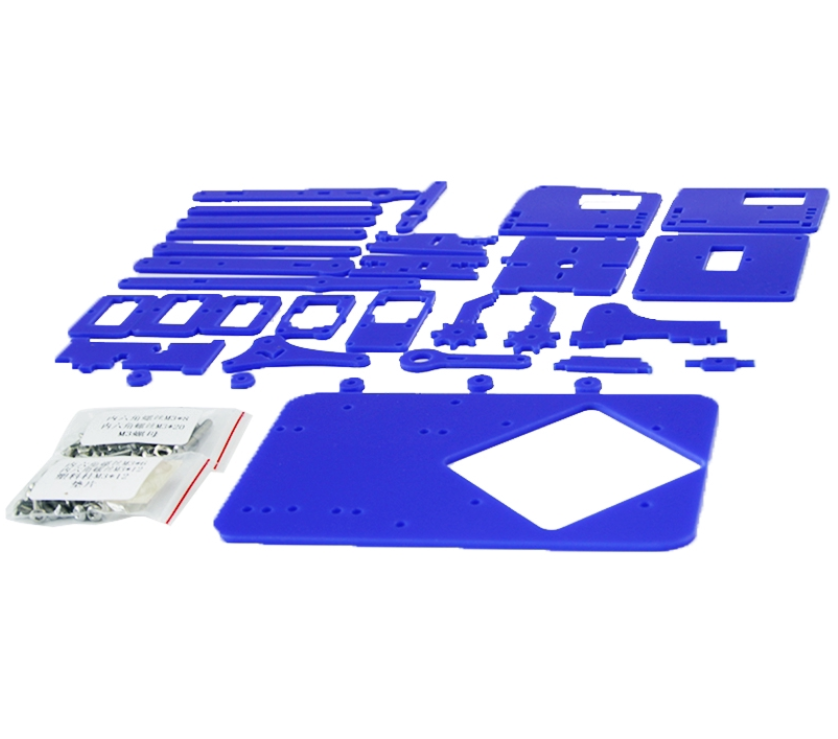
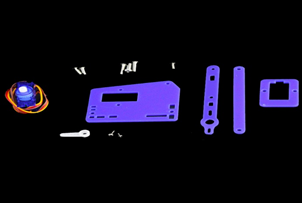
ขั้นตอนที่ 1: ตรวจสอบชิ้นส่วนทั้งหมดมีดังนี้
(1) M3x30 mm x 4 ชิ้น
(2) M3x12 mm x 8 ชิ้น
(3) M3x10 mm x 5 ชิ้น
(3) M3x10 mm x 5 ชิ้น
(4) M3x8 mm x 20 ชิ้น
(5) M3x6 mm x 13 ชิ้น
(6) Nut x 13 ชิ้น
(7) Arm acrylic parts x28 ชิ้น
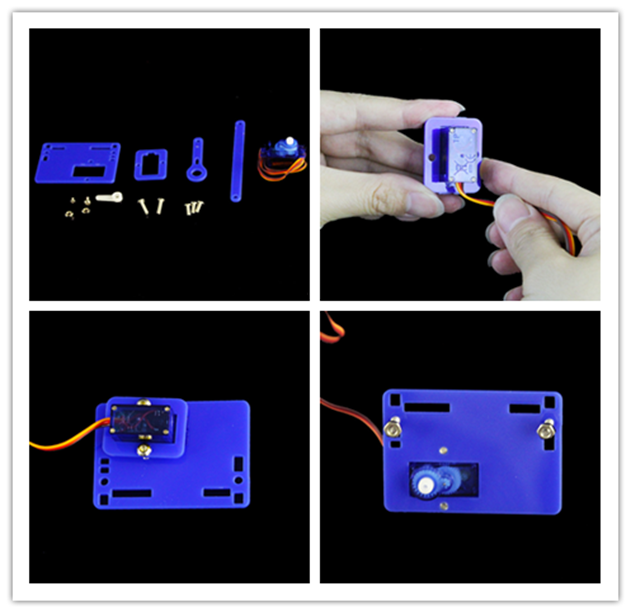
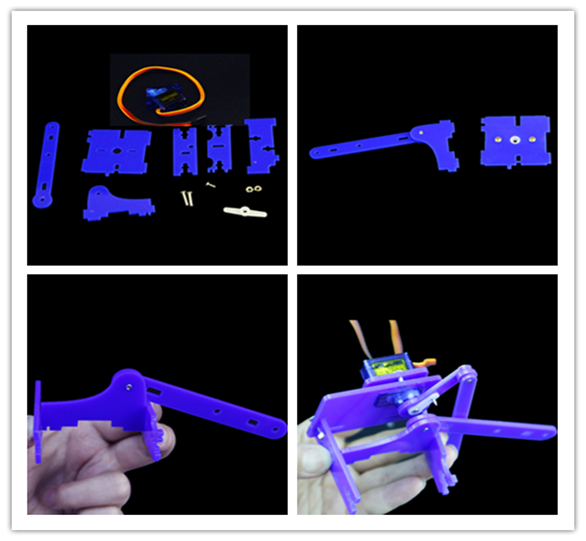
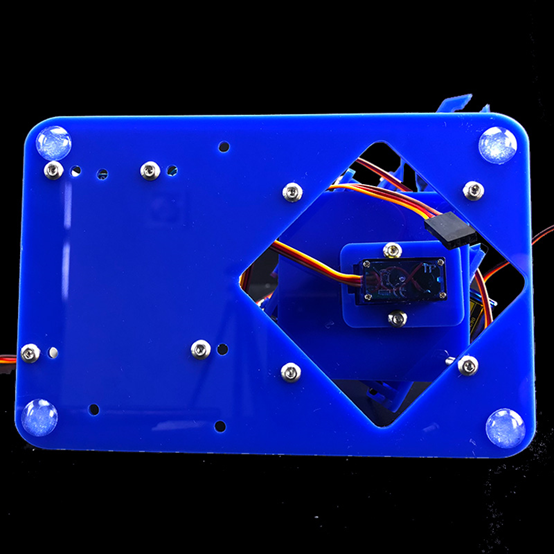
ขั้นตอนที่ 2: ประกอบฐาน สิ่งที่ต้องจัดเตรียมคือ
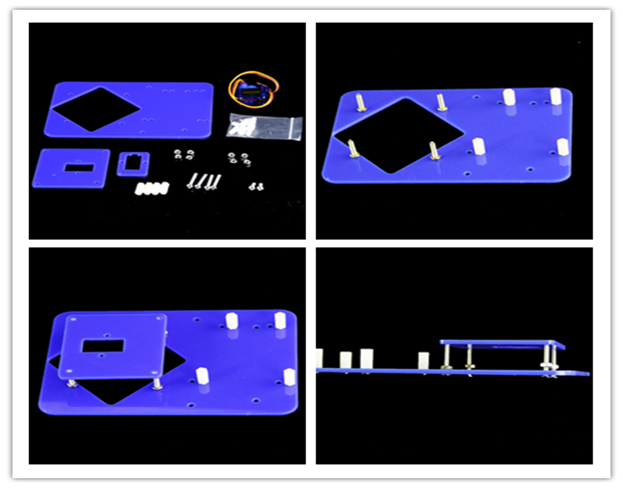
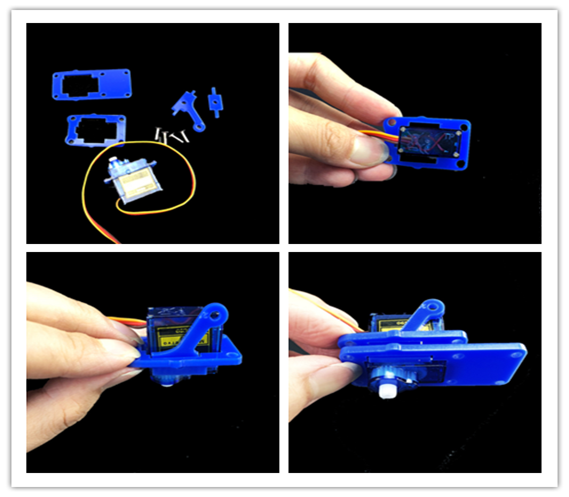
ขั้นตอนที่ 3: ติดตั้งเซอร์โวมอเตอร์
หมายเหตุ: ขนาดของมอเตอร์ใกล้เคียงกับอะคริลิกมากดังนั้นควรใช้แรงอย่างช้าๆเพื่อหลีกเลี่ยงไม่ให้อะคริลิกแตกควรให้ความระมัดระวังด้วย
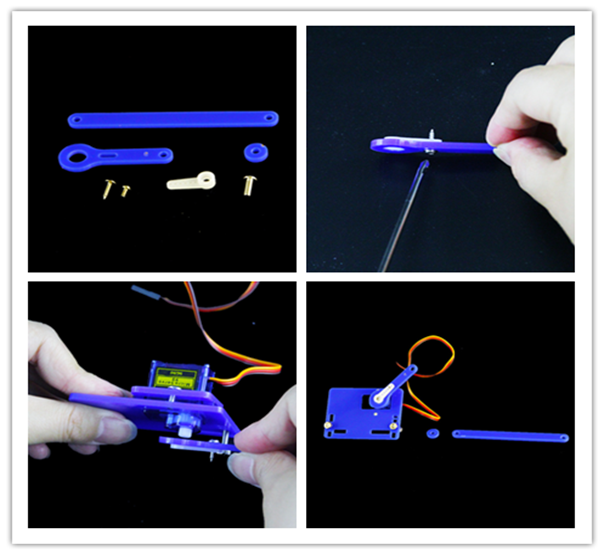
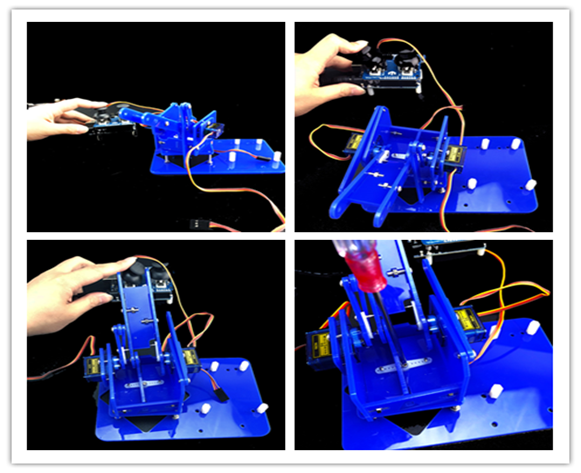
ขั้นตอนที่ 4: แขนซ้าย
จุดสำคัญของขั้นตอนนี้คือการปรับมุมของมอเตอร์โปรดใส่ปลอกแขนสีขาวขนาดเล็กบนมอเตอร์ก่อนหลังจากติดตั้งโมดูลแผงวงจรทั้งสองแล้วให้เปิดเครื่องเสียบสายมอเตอร์เข้ากับปลั๊กแถวแรกแล้วหมุนจอยสติ๊กไปทางขวาเพื่อให้มอเตอร์ "ตามเข็มนาฬิกา" หันไปที่ภาพสุดท้ายเช่นภาพที่สองถึงภาพสุดท้ายจากนั้น "ทวนเข็มนาฬิกา" เพื่อหันไปที่ภาพแรกจากด้านล่าง
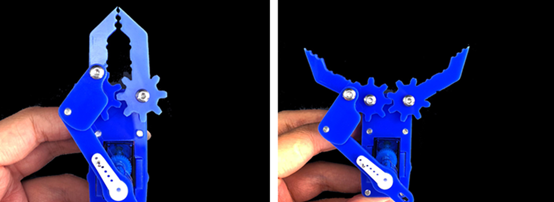
ขั้นตอนที่ 5: แขนขวา
จุดสำคัญของขั้นตอนนี้คือการปรับมุมมอเตอร์ด้วยโปรดใส่ฝาปิดสีขาวขนาดเล็กบนมอเตอร์ก่อนหลังจากเสียบปลั๊กโมดูลและเปิดเครื่องแล้วให้หมุนจอยสติ๊กไปทางขวา "ตามเข็มนาฬิกา" จนกว่าจะไม่สามารถหมุนได้จากนั้นติดตั้งรูปแบบสุดท้ายที่ 3 นาฬิกา มุมจากนั้นคุณสามารถหมุนได้อย่างอิสระ
ต้องใช้สกรู:
(1) 12 มม. x 3 ชิ้น
(2) 8 มม. x 2 ชิ้น
(3) 6 มม. x 1 ชิ้น

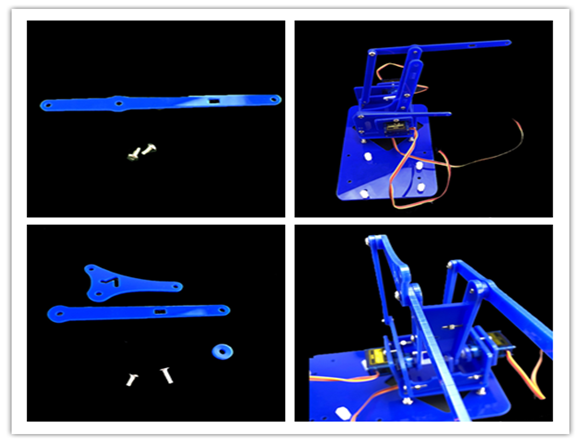
ขั้นตอนที่ 6: แขนซ้าย + แชสซี (chassis)
หลังจากรวมภาพแรกจากด้านล่างแล้วให้ค่อยๆขันสกรูให้แน่นและสุดท้ายก็ติดตั้งโครงเครื่อง ต้องใช้สกรู:
(1) 12 มม. x 2 ชิ้น
(2) 6 มม. x 1 ชิ้น
ขั้นตอนที่ 7: แขนขวา + แชสซี (chassis)
ใส่และขันสกรูเล็กน้อยโดยใช้มือที่ถนัด
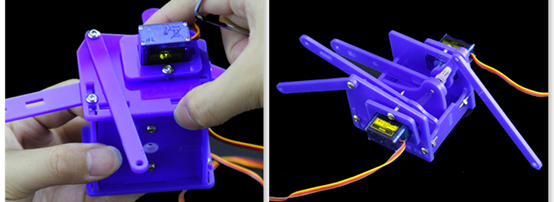
ขั้นตอนที่ 8: แผ่นยึดมอเตอร์ตัวที่อยู่ตรงกลาง
หลังจากใส่น็อตแล้วให้ใส่ตัวยึดจากนั้นขันสกรูให้แน่น
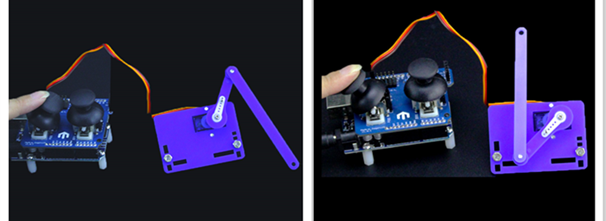
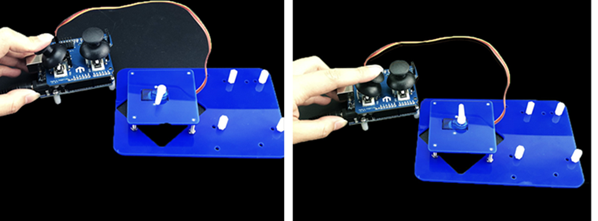
ขั้นตอนที่ 9: รวมเข้ากับฐาน
สิ่งที่สำคัญที่สุดที่ต้องใส่ใจในขั้นตอนนี้คือมุมของเฟืองบังคับเลี้ยว: สายเกียร์บนพวงมาลัยเพาเวอร์เสียบเข้ากับแผงวงจร - จอยสติ๊กจะหมุนไปทางซ้ายไปจนสุดทิศทางของชุดสีขาวขนาดเล็กจะเป็นดังที่แสดงในภาพที่สองถึงสุดท้าย - จอยสติ๊กจะหันไปทางขวาจนสุดทิศทางชุดสีขาว นับถอยหลังไปที่ภาพแรกจากนั้นแขนหุ่นยนต์ทั้งหมดสามารถหมุนได้ภายในระยะการควบคุมของคุณจากนั้นจึงหมุนได้ตามต้องการอย่าลืมล็อคสกรูขนาดเล็กที่อยู่ตรงกลางของมอเตอร์
ขั้นตอนที่ 10: แกนรองรับ
ต้องใช้สกรู:
(1) 6 มม. x 3 ชิ้น
(2) 8 มม. x 1 ชิ้น
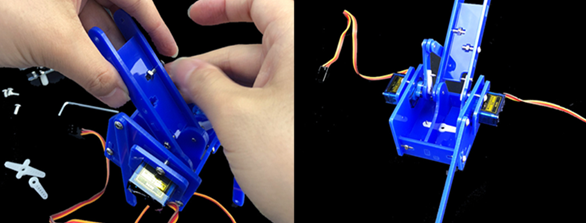
ขั้นตอนที่ 11: มอเตอร์ตัวสุดท้าย
ต้องใช้สกรู:
(1) 8 มม. x 4 ชิ้น
ขั้นตอนที่ 12: ติดตั้ง
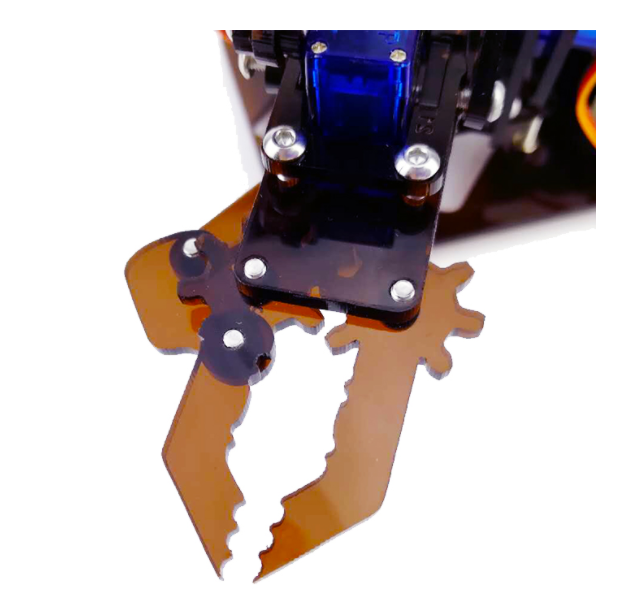
จุดสำคัญของขั้นตอนนี้คือมอเตอร์อ้างแล้ว เมื่อจอยสติ๊กหันไปทางซ้ายและขวาอุ้งเท้าสามารถดำเนินการเปิดและปิดได้อย่าลืมล็อคสกรูของมอเตอร์
ต้องใช้สกรู:
(1) 8 มม. x 1 ชิ้น
(2) 6 มม. x 3 ชิ้น
ขั้นตอนที่ 13: ตัวหนีบด้านบน + ใส่เซอร์โว
แผ่นฐานและปะเก็น
ขั้นตอนที่ 13: ตัวหนีบด้านบน + ใส่เซอร์โว
แผ่นฐานและปะเก็น
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



ไมโครอิเล็กทรอนิกส์
098-xxxxxx-9
Accept All Banks | รับเงินได้จากทุกธนาคาร
นโยบายการเปลี่ยนหรือคืนสินค้า
หากสินค้าชำรุดหรือใช้งานไม่ได้ สามารถขอเปลี่ยนสินค้าได้ภายใน 7 วัน
หมายเหตุ
ต้องไม่เสียหายอันเกิดจากใช้งานผิดพลาด ใช้ผิดวิธี ต่อไฟผิดขั้ว จ่ายไฟเกินกำหนด หรืออื่นๆที่ตรวจสอบแล้วไม่ได้เกิดจากความผิดพลาดจากการผลิตสินค้า
หมายเหตุ
ต้องไม่เสียหายอันเกิดจากใช้งานผิดพลาด ใช้ผิดวิธี ต่อไฟผิดขั้ว จ่ายไฟเกินกำหนด หรืออื่นๆที่ตรวจสอบแล้วไม่ได้เกิดจากความผิดพลาดจากการผลิตสินค้า

Member
▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

MikroElectronic
จำหน่ายอุปกรณ์อิเล็กทรอนิกส์ โมดูล เครื่องมือ และอุปกรณ์ต่างๆ arduino อาดูโน อะไหล่เครื่องใช้ไฟฟ้า อะไหล่อิเล็กทรอนิกส์ รับออกแบบวงจร เขียนโปรแกรมด้วยอาดูโน รับทำโครงงาน นักเรียนนักศึกษา ให้คำปรึกษาแก้ปัญหาโครงงาน ออกแบบและสร้างงานต้นแบบ ร้านตั้งอยู่ ซอยร่วมสุข ปทุมธานี สถานที่ใกล้เคียง ดอนเมือง สรงประภา ศรีสมาน นนทบุรี แจ้งวัฒนะ
เบอร์โทร : 0984829329
อีเมล : mikroelec@gmail.com
อีเมล : mikroelec@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม