

| หากต้องการใบเสนอราคา / ใบแจ้งหนี้ ติดต่อได้ทาง LINE Official: @mikroelec |
 |
โมดูลวัดระยะทางด้วยเลเซอร์ TOF050C 50CM(max) based on VL6180 IIC interface Distance Sensor Module




| รหัสสินค้า | SKU-02987 |
| หมวดหมู่ | เซนเซอร์วัดระยะทาง |
| ราคา | 125.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| ลงสินค้า | 2 ม.ค. 2568 |
| อัพเดทล่าสุด | 1 ส.ค. 2568 |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
| Documentation |
| Datasheet | VL6180.PDF |
| Application Note | VL6180X library for Arduino |
Features
Range: 2 to 50 cm
Dead zone: 0 to 2 cm
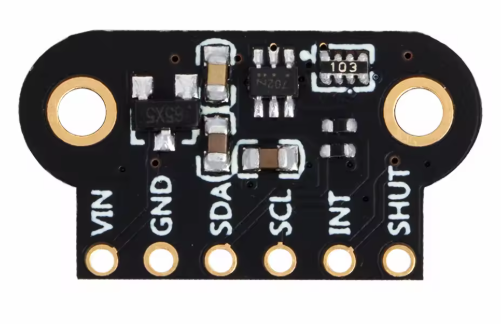
Interface: I2C
I2C address: 0x29
Viewing Angle (FOV): 25°
The ability to detect gestures
Protective cover
Two M2 mounting holes
Power supply: 3 to 5 V
Current consumption: 40 mA
Working temperature: -20 to 70°C
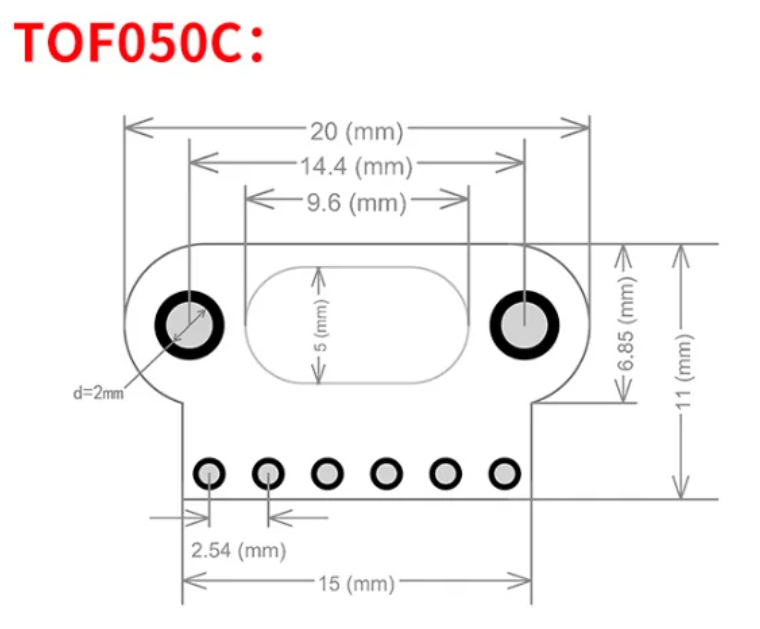
Dimensions: 20 x 11 mm
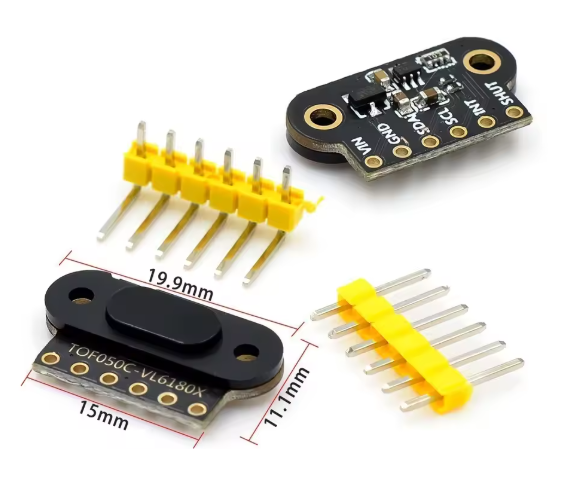
Kit contains
Module with sensor VL6180X
Straight male 6-pin goldpin connector
Male goldpin connector 6-pin angled
Overview
โมดูลเซ็นเซอร์วัดระยะทางแบบ ToF ที่ใช้ชิปรุ่น VL6180X โดยใช้เทคโนโลยี FlightSense ที่สามารถวัดระยะทางแบบสัมบูรณ์ได้โดยไม่ขึ้นกับสีและพื้นผิวของวัตถุที่ตรวจจับ เซ็นเซอร์สามารถวัดระยะทางของวัตถุได้ไกลถึง 50 ซม. โดยมีพื้นที่อับ (dead zone) ในช่วง 0 ถึง 2 ซม. และมีมุมการตรวจจับ 25 องศา นอกจากนี้โมดูลยังมีความสามารถในการตรวจจับท่าทาง (gesture) ด้วย
VL6180 สื่อสารผ่านอินเตอร์เฟซ I2C และผู้ใช้งานสามารถใช้ API (Application Programming Interface) ที่เป็นมิตรและใช้งานง่ายในภาษา C ได้ สามารถนำไปใช้ในแอปพลิเคชันเพื่อตรวจจับการมีอยู่ของวัตถุและสิ่งกีดขวางได้ทั้งในหุ่นยนต์อุตสาหกรรมและโครงสร้างเคลื่อนที่
Arduino Code Example
#include <Wire.h>
// Define TOF050C I2C Address (default is 0x52)
#define TOF050C_ADDR 0x52
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Start serial monitor
// Initialize sensor
initTOF050C();
Serial.println("TOF050C Sensor Ready!");
}
void loop() {
uint16_t distance = readDistance();
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" mm");
delay(100); // Read every 100ms
}
void initTOF050C() {
// Send initialization commands
Wire.beginTransmission(TOF050C_ADDR);
Wire.write(0x00); // Register address for configuration
Wire.write(0x01); // Start continuous measurement mode
Wire.endTransmission();
delay(100); // Wait for sensor to initialize
}
uint16_t readDistance() {
uint16_t distance = 0;
uint8_t data[2];
// Request 2 bytes from the sensor
Wire.beginTransmission(TOF050C_ADDR);
Wire.write(0x04); // Distance data register
Wire.endTransmission(false);
Wire.requestFrom(TOF050C_ADDR, 2);
if (Wire.available() >= 2) {
data[0] = Wire.read(); // High byte
data[1] = Wire.read(); // Low byte
// Combine bytes into distance value
distance = (data[0] << 8) | data[1];
}
return distance;
}
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



ไมโครอิเล็กทรอนิกส์
098-xxxxxx-9
Accept All Banks | รับเงินได้จากทุกธนาคาร
นโยบายการเปลี่ยนหรือคืนสินค้า
หากสินค้าชำรุดหรือใช้งานไม่ได้ สามารถขอเปลี่ยนสินค้าได้ภายใน 7 วัน
หมายเหตุ
ต้องไม่เสียหายอันเกิดจากใช้งานผิดพลาด ใช้ผิดวิธี ต่อไฟผิดขั้ว จ่ายไฟเกินกำหนด หรืออื่นๆที่ตรวจสอบแล้วไม่ได้เกิดจากความผิดพลาดจากการผลิตสินค้า
หมายเหตุ
ต้องไม่เสียหายอันเกิดจากใช้งานผิดพลาด ใช้ผิดวิธี ต่อไฟผิดขั้ว จ่ายไฟเกินกำหนด หรืออื่นๆที่ตรวจสอบแล้วไม่ได้เกิดจากความผิดพลาดจากการผลิตสินค้า

Member
▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

MikroElectronic
จำหน่ายอุปกรณ์อิเล็กทรอนิกส์ โมดูล เครื่องมือ และอุปกรณ์ต่างๆ arduino อาดูโน อะไหล่เครื่องใช้ไฟฟ้า อะไหล่อิเล็กทรอนิกส์ รับออกแบบวงจร เขียนโปรแกรมด้วยอาดูโน รับทำโครงงาน นักเรียนนักศึกษา ให้คำปรึกษาแก้ปัญหาโครงงาน ออกแบบและสร้างงานต้นแบบ ร้านตั้งอยู่ ซอยร่วมสุข ปทุมธานี สถานที่ใกล้เคียง ดอนเมือง สรงประภา ศรีสมาน นนทบุรี แจ้งวัฒนะ
เบอร์โทร : 0984829329
อีเมล : mikroelec@gmail.com
อีเมล : mikroelec@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม