

| หากต้องการใบเสนอราคา / ใบแจ้งหนี้ ติดต่อได้ทาง LINE Official: @mikroelec |
 |
RCWL-9610 Ultrasonic Sensor 2022 Version 3 to 5v Ultrasonic Distance Module replace for HC-SR04 with support for I2C, UART and 1-Wire


| รหัสสินค้า | SKU-02182 |
| หมวดหมู่ | เซนเซอร์วัดระยะทาง |
| ราคา | 45.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| ลงสินค้า | 10 ธ.ค. 2565 |
| อัพเดทล่าสุด | 29 ธ.ค. 2567 |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
สินค้าที่เกี่ยวข้อง

Description
Ultrasonic distance sensor HC-SR04+ version 2022. An improved version of the well-known sensor with an extended power range on the RCWL-9610 controller.
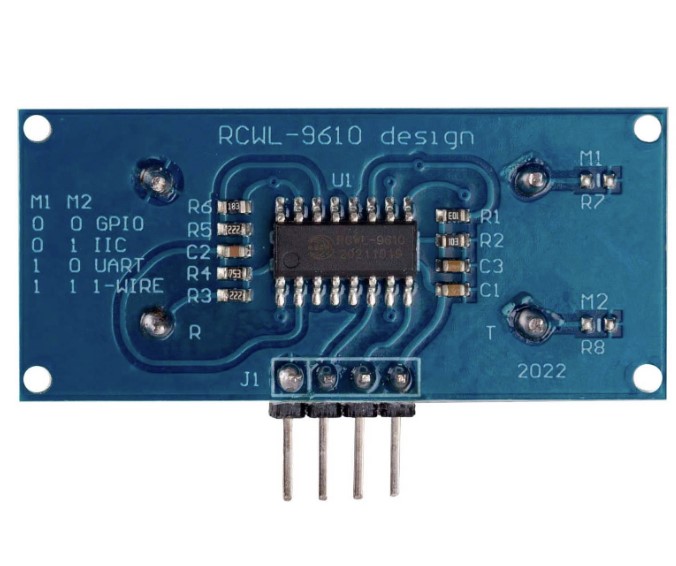
The use of the new controller complements the sensor interfaces: I2C, UART and 1-Wire. To change the interface, you need to install jumpers on the contacts on the back of the board.
No soldered jumpers, works exactly the same as the old version of the HC-SR04 module
Specification:
- supply voltage: from 3.3 to 5 V;
- current consumption in silence mode: 2 mA;
- current consumption in measurement mode: 15 mA;
- effective angle: 15°;
- working angle: 30°;
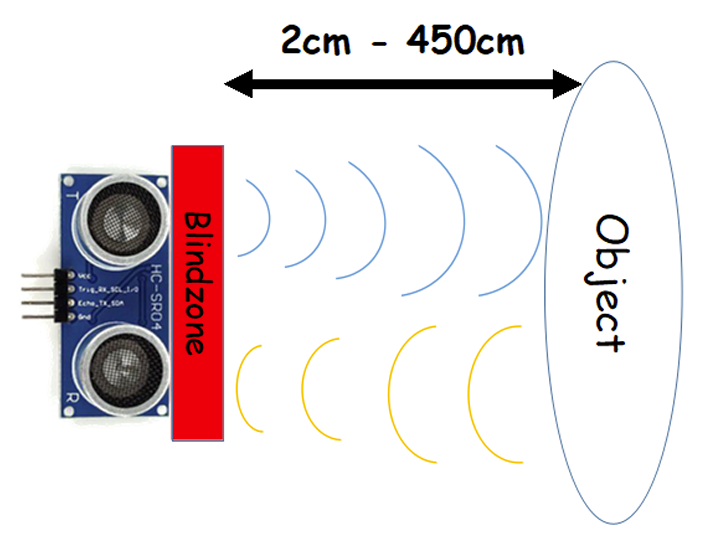
- measured distance: from 2 to 450 cm.
Tip: โมดูลนี้สามารถใช้ร่วมกับ
รหัสสินค้า SKU-00506 โมดูลมิเตอร์วัดระยะโดยใช้ร่วมกับ HC-SR04 ได้



Distance = [high-level time × velocity of sound (340M ⁄ s)] ⁄ 2
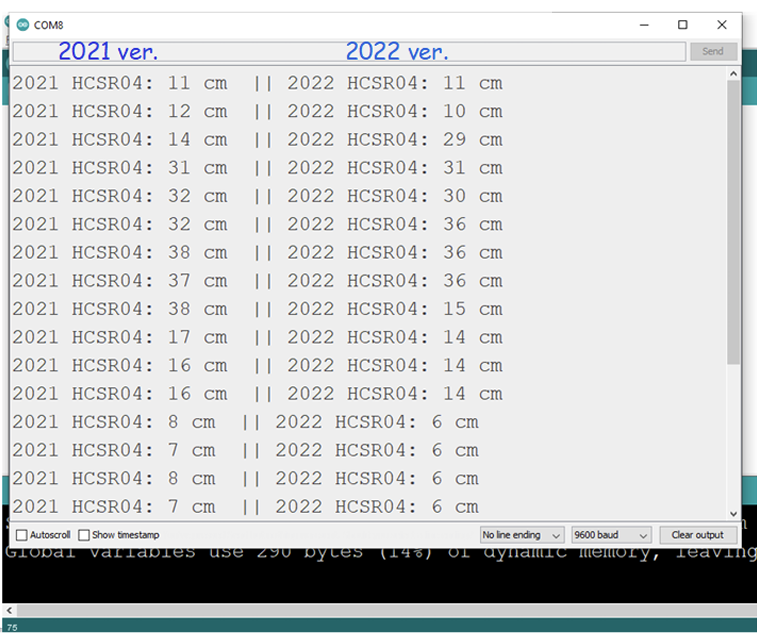
Distance test To prove that both newer and older version of HC-SR04P sensors works very similarly and perfectly fine, test using Arduino
| // ตัวอย่างโคด โหมด GPIO (default) – the standard HC-SR04 mode /** HC-SR04 (2022 Version RCWL-9610 Chip) |
//ตัวอย่างโคด โหมด I2C (IIC) /**
HC-SR04 (2022 Version RCWL-9610 Chip)
==========================================
IIC (I2C/TWI "Wire") Control Demonstration
------------------------------------------
This Arduino sketch demonstrates using the IIC
mode of the HC-SR04 2022 Version to read a
distance in centimeters.
To configure the module foro IIC the solder
jumper "M2" (back of board bottom right)
must be closed by putting a blob of solder
on it (M1 must be open, no blob).
-VCC = 3.3V/5.5V
-Trig_RX_SCL_I/O = A5
-Echo_TX_SDA = A4
-GND = GND
*/
#include <Wire.h>
float get_distance_cm()
{
// Setup the connection
static byte WireWasBegun = false;
if(WireWasBegun == false)
{
Wire.begin();
WireWasBegun = true;
}
// We need to delay by at least 30ms between readings
// so we don't get a false reading
static unsigned long lastread = 0;
if(millis() - lastread < 30)
{
delay(millis()-lastread);
}
lastread = millis();
// Send the trigger command 0x01 to the I2C address 0x57
// (the address can not be changed)
Wire.beginTransmission(0x57);
Wire.write(0x01);
Wire.endTransmission();
// Wait 150mS for the ping to complete
delay(150);
// Read 3 bytes from 0x57
byte response[3];
Wire.requestFrom(0x57,3);
for(byte i = 0; Wire.available() && (i <= 2); i++)
{
response[i] = Wire.read();
}
// Those three bytes get assembled like this to get the
// distance in micrometers
float micrometers = ((response[0]*65536UL)+(response[1]*256UL)+response[2]);
// And now we can return that in centimeters
// um / 1000000 = m
// m * 100 = cm
return micrometers / 1000000 * 100;
}
void setup()
{
Serial.begin(9600);
}
void loop()
{
float distance = get_distance_cm();
Serial.print("Distance: ");
Serial.print(distance);
Serial.println("cm");
delay(150);
}
|
//ตัวอย่างโคด โหมด UART
/**
HC-SR04 (2022 Version RCWL-9610 Chip)
==========================================
UART Control Demonstration
------------------------------------------
This Arduino sketch demonstrates using the UARTO
mode of the HC-SR04 2022 Version to read a distance in
centimeters.
To configure the module for UART the solder
jumper "M1" (back of board top right)
must be closed by putting a blob of solder
on it (M2 must be open, no blob).
-VCC = 3.3V/5.5V
-Trig_RX_SCL_I/O = A5
-Echo_TX_SDA = A4
-GND = GND
*/
#include "SoftwareSerial.h"
float get_distance_cm()
{
// Connect the arduino to the SR04 pins as defined here
// (you can change A4 and A5 to any othoer uonused pins for UART mode)
const int SR04_Trig_RX_SCL = A5;
const int SR04_Echo_TX_SDA = A4;
// Create our UART connection to the device using SoftwareSerial
static SoftwareSerial *SR04;
if(!SR04)
{
SR04 = new SoftwareSerial(SR04_Echo_TX_SDA, SR04_Trig_RX_SCL);
SR04->begin(9600);
}
// We need to delay by at least 30ms between readings
// so we don't get a false reading
static unsigned long lastread = 0;
if(millis() - lastread < 30)
{
delay(millis()-lastread);
}
lastread = millis();
// Send the trigger command 0XA0
SR04->flush();
SR04->write(0xA0);
// Wait 150mS for the ping to complete
delay(150);
// Read 3 bytes
byte response[3];
for(byte i = 0; SR04->available() && i <= 2; i++)
{
response[i] = SR04->read();
}
// Those three bytes get assembled like this to get the
// distance in micrometers
float micrometers = ((response[0]*65536UL)+(response[1]*256UL)+response[2]);
// And now we can return that in centimeters
// um / 1000000 = m
// m * 100 = cm
return micrometers / 1000000 * 100;
}
void setup()
{
Serial.begin(9600);
}
void loop()
{
float distance = get_distance_cm();
Serial.print("Distance: ");
Serial.print(distance);
Serial.println("cm");
delay(150);
}
|
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



ไมโครอิเล็กทรอนิกส์
098-xxxxxx-9
Accept All Banks | รับเงินได้จากทุกธนาคาร
นโยบายการเปลี่ยนหรือคืนสินค้า
หากสินค้าชำรุดหรือใช้งานไม่ได้ สามารถขอเปลี่ยนสินค้าได้ภายใน 7 วัน
หมายเหตุ
ต้องไม่เสียหายอันเกิดจากใช้งานผิดพลาด ใช้ผิดวิธี ต่อไฟผิดขั้ว จ่ายไฟเกินกำหนด หรืออื่นๆที่ตรวจสอบแล้วไม่ได้เกิดจากความผิดพลาดจากการผลิตสินค้า
หมายเหตุ
ต้องไม่เสียหายอันเกิดจากใช้งานผิดพลาด ใช้ผิดวิธี ต่อไฟผิดขั้ว จ่ายไฟเกินกำหนด หรืออื่นๆที่ตรวจสอบแล้วไม่ได้เกิดจากความผิดพลาดจากการผลิตสินค้า

Member
▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

MikroElectronic
จำหน่ายอุปกรณ์อิเล็กทรอนิกส์ โมดูล เครื่องมือ และอุปกรณ์ต่างๆ arduino อาดูโน อะไหล่เครื่องใช้ไฟฟ้า อะไหล่อิเล็กทรอนิกส์ รับออกแบบวงจร เขียนโปรแกรมด้วยอาดูโน รับทำโครงงาน นักเรียนนักศึกษา ให้คำปรึกษาแก้ปัญหาโครงงาน ออกแบบและสร้างงานต้นแบบ ร้านตั้งอยู่ ซอยร่วมสุข ปทุมธานี สถานที่ใกล้เคียง ดอนเมือง สรงประภา ศรีสมาน นนทบุรี แจ้งวัฒนะ
เบอร์โทร : 0984829329
อีเมล : mikroelec@gmail.com
อีเมล : mikroelec@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม